具身智能

国家数据局:2026 年我国将在智能体、具身智能等前沿方向布局一批数据标准
AI在线 1 月 6 日消息,据央视新闻从国家数据局获悉,2026 年,我国将推出 30 余项数据领域国家标准,新兴领域的标准研制速度持续加快。 AI在线从报道获悉,2026 年,我国将在智能体、具身智能等前沿方向布局一批数据标准。 与此同时,公共数据、高质量数据集、数据基础设施等方向的一批急需标准也将加快出台。

智元机器人携手MiniMax!共推具身智能语音交互,文本到语音全链路AI技术落地人形机器人
具身智能与大模型的融合再进一步。 智元机器人近日宣布与MiniMax(上海稀宇科技)达成战略合作,MiniMax将为智元人形机器人提供端到端的文本到语音(TTS),显著提升机器人在真实场景中的自然交互能力与情感表达水平。 全链路语音赋能,打造“会说话”的智能体此次合作聚焦语音合成核心技术,MiniMax将其在高自然度语音生成、多情感语调建模、低延迟实时推理等方面的领先能力,深度集成至智元机器人系统。

CES 2026超前瞻:空间智能来势汹汹!从实验室奢侈品到消费级刚需,如何重塑 AI 具身时代?
明天,一年一度的 CES 即将在美国拉斯维加斯璀璨开幕。 作为全球科技产业最重要的风向标之一,笔者在超前探访之后欣喜发现,在今年机器人「后厨翻炒」与 AI 眼镜「同声传译」的热闹之外,行业终于开始直面核心命题:无法理解三维空间的 AI,终究只是缺乏行动力的 「语言巨人」。 如何解题?

高德布局“世界模型”并成立具身业务部,从地图导航跨越至具身智能
阿里巴巴旗下高德地图正迎来品牌历史上最重大的技术转型。 自2025年8月宣布全面 AI 化并转向空间智能领域以来,高德近期在空间智能评测基准 WorldScore 中展现出统治力,凭借自研的世界模型夺得多个指标的第一名。 该基准由斯坦福大学李飞飞教授团队提出,是目前评估多模态世界生成模型最权威的开源标准,这意味着高德已具备理解并模拟复杂物理世界规律的顶尖能力。

智元发布第二代一体化具身大小脑系统 GenieReasoner,推理能力达 SOTA
AI在线 1 月 1 日消息,智元具身研究中心今日宣布推出第二代一体化具身大小脑系统 GenieReasoner。 针对 VLA 模型中语义推理与动作控制的模态对齐难题,智元具身研究中心提出了一种支持统一离散化预训练的模型架构,并通过流匹配(Flow-matching)缓解了传统离散 Tokenizer 的动作精度瓶颈。 同时具身研究中心开源了 ERIQ-聚焦于真机操控全流程的具身推理评测基准,用以解耦量化评估 VLA 中具身大脑不同维度的推理能力。

苏州乐享发布具身智能品牌“元点智能”,全尺寸机器人原型首度亮相
今日,苏州乐享智能科技有限公司(以下简称“乐享科技”)正式发布全新具身智能品牌**“元点智能(Zeroth)”。 伴随品牌TVC的发布,其首个全尺寸大人形机器人原型**也揭开了神秘面纱,标志着公司正式进入通用机器人研发的新阶段。 多元矩阵:从户外探索到家庭陪伴随着全尺寸机器人的加入,元点智能已初步构建起覆盖全场景的产品矩阵:户外领域(W1): 履带式机器人,适配复杂地形。
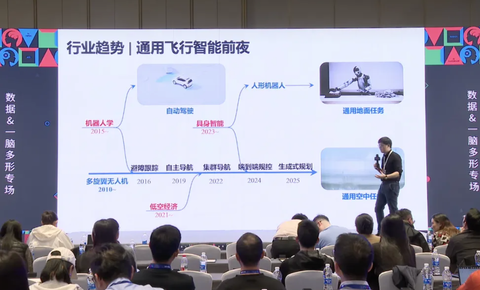
微分智飞高飞:我们正处于通用飞行智能爆发前夜丨GAIR 2025
过去两年,具身智能的火热源于一个共同期待:大语言模型的出色能力有目共睹,若将其接入机器人,有望赋予机器人更聪明的大脑,从而为行业打开新空间。 然而热闹两年后,具身智能仍没有标准答案,却出现了很多细分领域,智能飞行机器人就是其中一个重要分支。 浙江大学控制学院长聘副教授、博士生导师高飞,就是这个领域的一位非常优秀的年轻学者。

对话微分智飞高飞:看具身智能如何引发飞行认知革命 | GAIR 2025
作者丨齐铖湧编辑丨马晓宁本文整理自高飞与AI科技评论的对话:01传统无人机和飞行具身智能AI科技评论:您提出“飞行具身智能”这一概念,它与传统的无人机智能有何本质区别? 高飞:具身智能的本质是“智能机器人”,赋予各种机器人认知、推理和泛化决策的能力,对于飞行也不例外,将会重新定义飞行机器人。 拿操作类的机器人打比方,双臂具身智能和传统工业机械臂的本体很相似,甚至可能完全长得一样,但双臂具身智能具备几个关键能力:泛化通用、自主决策。
三维空间太难懂?RoboTracer让机器人理解复杂空间指令,推理3D空间轨迹,开放世界也能精确行动
本文的主要作者来自北京航空航天大学、北京大学、北京智源人工智能研究院和中科院自动化研究所。 本文的第一作者为北京航空航天大学博士生周恩申,主要研究方向为具身智能和多模态大模型。 本文的共一作者兼项目负责人为北京智源研究院研究员迟程。
全异构、全异步的RLinf v0.2尝鲜版发布,支持真机强化学习,像使用GPU一样使用你的机器人!
在具身智能领域,特别是如何构造一个高泛化性的 VLA,数据之争一直存在:仿真数据 vs 真机数据。 数据来源不同,导致算法设计迥然不同,进一步对系统设计提出了更多的要求。 做 infra 的目标是做好服务,支持不同技术路线的探索。
智能体如何学会「想象」?深度解析世界模型嵌入具身系统的三大技术范式
长期以来,具身智能系统主要依赖「感知 - 行动」的反应式回路,缺乏对未来的预测能力。 而世界模型的引入,让智能体拥有了「想象」未来的能力。 具身智能机器人通过世界模型想象抓杯子任务那么关键问题来了:世界模型应该如何「放进」具身系统中?

造硬件造数据:诺亦腾机器人完成 Pre-A+ 轮融资,加速攻克具身智能数据荒
具身智能与人形机器人数据服务商**诺亦腾机器人(Noitom Robotics)**近日宣布完成 Pre-A 轮融资。 本轮融资由启明创投领投,五源资本、君联资本等机构参投,经纬创投、英诺天使基金追加投资,最终实现超额认购。 本轮融资后,加上此前由阿尔法公社领投的 Pre-A 轮,诺亦腾机器人累计募集资金已达数亿元人民币。

国内首个国标 VLA 大模型开源!北京人形 XR-1让机器人真正“会干活”
国内具身智能领域在12月18日迎来重大突破:北京人形机器人创新中心宣布正式开源具身 VLA 大模型 XR-1。 这是国内首个、也是目前唯一通过具身智能国家标准测试的视觉-语言-动作(VLA)大模型,标志着我国人形机器人从“实验室行走”向“真实场景干活”迈出了关键一步。 此次开源不仅包含 XR-1大模型,还配套发布了强大的数据底座 RoboMIND2.0 以及高保真数字资产数据集 ArtVIP 最新版。

国内唯一通过具身智能国标测试,北京人形机器人创新中心开源 XR-1 模型
AI在线 12 月 19 日消息,12 月 18 日,北京人形机器人创新中心正式开源国内首个且唯一通过具身智能国标测试的具身 VLA 大模型 XR-1,以及配套的数据基础 RoboMIND 2.0、ArtVIP 最新版。 围绕“具身天工”平台,北京人形已发布具身天工 2.0、天轶 2.0 等多类型通用本体,为人形机器人干活奠定物理本体基础。 而具身大脑和小脑的协同是人形机器人干活的另一前提,目前围绕“慧思开物”,北京人形已开源 WoW(我悟)世界模型和 Pelican-VL(天鹕)等具身大脑相关成果。

与Physical Intelligence同日发声:深度机智亮出「情境数采」杀手锏,具身智能的通用性天花板要被捅破了?
机器之心发布具身智能通往通用性的征途,正被 “数据荒漠” 所阻隔。 当模型在模拟器中刷出高分,却在现实复杂场景中频频 “炸机” 时,行业开始反思:我们喂给机器人的数据,是否真的包含人类操作的精髓? 近日,深度机智在以人类第一视角为代表的真实情境数据,筑牢物理智能基座,解决具身智能通用性难题的道路上又有重要举措。

工业具身新标杆:人形机器人“小墨”规模化入驻宁德时代产线
近日具身智能领域迎来重大里程碑:全球首条实现人形机器人规模化落地的新能源动力电池 PACK 生产线,在宁德时代中州基地正式投运。 由宁德时代生态企业 千寻智能 研发的人形机器人“小墨”已批量上岗,专门负责电池包下线前最具挑战性的 EOL(最终功能测试)与 DCR(直流内阻测试)工序。 这一环节长期以来因涉及数百伏高压插接操作、环境复杂且柔性要求极高而高度依赖人工,而“小墨”的引入不仅彻底消除了高压打火带来的安全风险,更将单日工作量提升了三倍,插接成功率稳定在99% 以上。

具身智能的数据难题,终于有了可规模化的解法
允中 发自 凹非寺. 量子位 | 公众号 QbitAI科技赛道从不缺“造梦者”,但能精准击中行业痛点的“破局者”往往寥寥。 在ToB世界里,真正称得上“标杆”的,或许不是那些自称“通用AI模型玩家”的公司,而是另一类更务实的路径:.
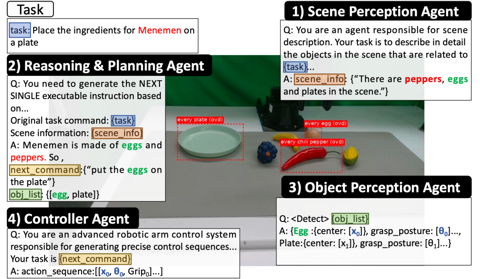
Dexmal原力灵机提出ManiAgent,用多智能体协作重构机器人操控
在机器人操控领域,Vision-Language-Action (VLA) 模型曾被视为通往通用机器人的“圣杯”。 当前,它却面临着严重的瓶颈问题:数据饥渴与分布外(OOD)失效:VLA 很依赖大规模、高质量的演示数据;一旦遇到训练数据分布之外的场景,或者数据量稍有不足,性能明显下降。 模型容量与推理能力互斥:为了让模型学会动作控制而进行的微调,会破坏 LLM 原本拥有的高层语义理解和推理能力。
资讯热榜
标签云
AI
人工智能
OpenAI
AIGC
模型
ChatGPT
谷歌
DeepSeek
AI新词
AI绘画
大模型
机器人
数据
Midjourney
开源
Meta
微软
智能
用户
GPT
学习
英伟达
Gemini
智能体
技术
马斯克
Anthropic
图像
AI创作
训练
LLM
论文
AI for Science
代码
腾讯
苹果
算法
Agent
Claude
芯片
具身智能
Stable Diffusion
xAI
蛋白质
人形机器人
开发者
生成式
神经网络
机器学习
AI视频
3D
字节跳动
大语言模型
RAG
Sora
百度
研究
GPU
生成
华为
工具
AGI
计算
生成式AI
AI设计
大型语言模型
搜索
亚马逊
AI模型
视频生成
特斯拉
DeepMind
场景
Copilot
深度学习
Transformer
架构
MCP
编程
视觉