自动驾驶
福特2026CES 官宣:AI 助手明年上线,2028年直指“无视线”自动驾驶
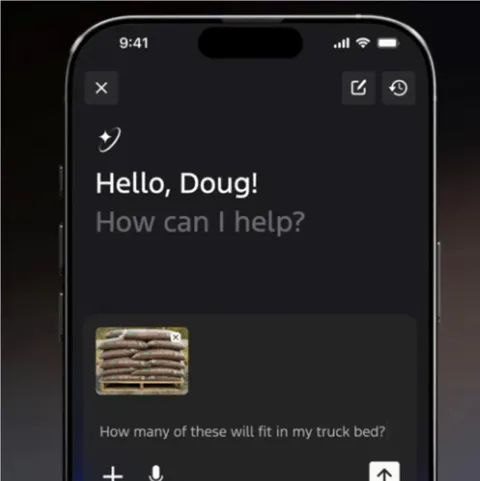
在2026年国际消费电子展(CES)上,福特汽车通过一场聚焦“科技与人文交汇”的演讲,正式揭晓了其未来两年的智能化核心蓝图,标志着这家传统巨头在 AI 驱动与自动驾驶领域的全面发力。 福特宣布正在开发一款由谷歌云托管并基于大语言模型(LLM)构建的人工智能助手。 该助手最大的亮点在于拥有对车辆特定信息的深度访问权限,不仅能解答如卡车货箱容量等高级百科问题,还能提供机油寿命等细致的实时监控数据。

Mobileye 斥资9亿美元开启3.0时代,跨界人形机器人布局“物理 AI”
自动驾驶技术巨头 Mobileye 周二在拉斯维加斯消费电子展(CES)上重磅宣布,将以约 9亿美元的价格收购人形机器人初创公司 Mentee Robotics。 此举标志着 Mobileye 正式跨越汽车领域,开启总裁阿姆农·沙舒亚(Amnon Shashua)所定义的“Mobileye3.0时代”。 核心交易:高溢价收购与关联交易回避根据协议,Mobileye 将支付 6.12亿美元现金及至多 2620万股普通股。
英伟达开源自动驾驶模型,欲引领 “物理 AI 新时代”
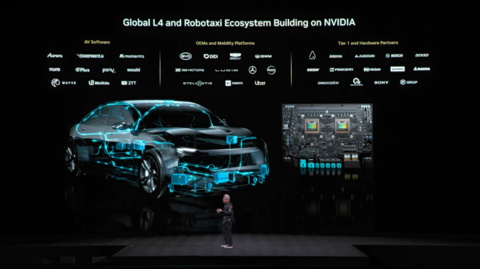
在最近的2026年国际消费电子展(CES)上,英伟达创始人兼 CEO 黄仁勋激动地宣布,物理 AI 的 “ChatGPT 时刻” 已经到来。 他预测,未来将有10亿辆汽车实现高度或完全自动驾驶,而无人驾驶出租车将成为这一革命性进展的首批受益者。 黄仁勋在拉斯维加斯的发布会上展示了英伟达的新兴产品,尤其是面向自动驾驶领域的开源模型 Alpamayo。

特斯拉马斯克隔空回应英伟达:自动驾驶做到99%不难,难在剩下的“长尾”挑战
在2026年消费电子展(CES)上,芯片巨头英伟达(NVIDIA)高调推出了全新的Alpamayo系列开放式 AI 模型及相关工具,旨在通过大模型技术攻克自动驾驶的安全难题。 然而,这一举动很快引起了特斯拉 CEO 埃隆·马斯克的关注,他在社交媒体上对此作出了颇具针对性的评价。 马斯克表示,英伟达目前所做的正是特斯拉已经在深耕的领域。

AAAI 2026 | 小鹏联合北大,专为VLA模型定制视觉token剪枝方法,让端到端自动驾驶更高效
VLA 模型正被越来越多地应用于端到端自动驾驶系统中。 然而,VLA 模型中冗长的视觉 token 极大地增加了计算成本。 但现有的视觉 token 剪枝方法都不是专为自动驾驶设计的,在自动驾驶场景中都具有局限性。

北交大 x 小米 EV 团队:一次关于世界模型「靠不靠谱」的系统复盘
在自动驾驶研究不断向世界模型演进的过程中,一个长期被回避却无法忽视的问题正逐渐凸显:模型在论文中的性能提升,是否真的对应着系统在真实驾驶环境中的鲁棒性提升?过去数年中,大量工作通过更复杂的生成结构、更精细的预测目标和更先进的训练策略,使世界模型在视觉预测与场景生成指标上取得了显著进展。 然而,在工程实践中,这些看起来 reminder 的模型,往往并不能稳定支撑长期决策、复杂交互和安全约束并存的真实驾驶系统。 问题并不完全出在模型本身,而更深层地指向了实验范式与评测目标的错位:我们究竟在通过实验验证什么?

刷新NAVSIM SOTA,复旦引望提出Masked Diffusion端到端自动驾驶新框架
随着 VLA(Vision-Language-Action)模型的兴起,端到端自动驾驶正经历从「模块化」向「大一统」的范式转移。 然而,将感知、推理与规划压缩进单一模型后,主流的自回归(Auto-regressive)生成范式逐渐显露出局限性。 现有的自回归模型强制遵循「从左到右」的时序生成逻辑,这与人类驾驶员的思维直觉存在本质差异 —— 经验丰富的驾驶员在处理复杂路况时,往往采用「以终为始」的策略,即先确立长期的驾驶意图(如切入匝道、避让行人、靠边停靠),再反推当前的短期操控动作。

Waymo 拟为无人出租车接入 Gemini 助手,1200行“系统指令”严防 AI 越位
自动驾驶领跑者Waymo近期被曝正在进行一项有趣的尝试:在其无人驾驶出租车(Robotaxi)中集成谷歌Gemini人工智能助手。 这一举动旨在为乘客提供一位能全程陪伴、答疑解惑,甚至能调控车内环境的“虚拟管家”。 根据研究人员挖掘的代码显示,Waymo为这位车载助手制定了长达1200多行的“系统指令”。

Waymo车内将现Gemini AI助手!1200行指令曝光,定义“安全、简洁、不越界”的乘客陪伴者
自动驾驶的“沉默旅程”即将终结。 知名科技研究员 Jane Manchun Wong 近日通过逆向工程发现,Waymo 正在测试将谷歌 Gemini 大模型深度集成至其无人驾驶出租车,打造一款名为 “Waymo 出行助手” 的车载AI伴侣。 尽管尚未上线,但一份长达1200多行的内部系统指令(代号“Waymo 出行助手元指令”)已完整曝光,揭示了这款AI如何被精心设计为安全、克制、高度场景化的乘客服务引擎。
旧金山大停电,Waymo自动驾驶汽车瘫痪,特斯拉赢麻了
上周六,美国旧金山发生了一次大规模的停电事故。 这次停电事件似乎是由该市一处 太平洋煤气与电力公司(Pacific Gas & Electric,PG&E)变电站发生火灾所引发的。 SFGate 报道称,约有 12 万名用户受到此次停电影响。

旧金山大停电致Waymo全城“瘫痪”!数百辆无人出租车停摆街头,暴露自动驾驶脆弱性
一场突发的大规模停电,让全球最先进的自动驾驶系统瞬间“失能”。 当地时间12月21日晚,因太平洋燃气电力公司(PG&E)变电站起火引发的旧金山大范围断电,导致Waymo在旧金山的Robotaxi服务全面瘫痪——大量无人驾驶车辆停滞在道路中央与十字路口,造成严重交通拥堵,社交媒体上充斥着“被AI汽车堵死”的无奈视频。 据目击者拍摄的画面显示,多辆Waymo无人车静止不动,后方人类驾驶员寸步难行,只得绕行或长时间等待。
何小鹏硅谷归来感悟:物理 AI 迎来三年爆发期,人形机器人将成巨头“大逃杀”
12月17日,小鹏汽车董事长何小鹏在朋友圈发文分享了其赴美交流后的深度洞察。 何小鹏在与硅谷近三十位 AI 专家交流后指出,当前 AI 领域整体不存在泡沫,行业正处于从0到0.1的起步阶段。 他特别强调,虽然数字 AI 领域如 OpenAI 正在全力推进业务落地,但未来三年最有可能产生大变局的是物理 AI 领域。

Rivian 自研 AI 芯片将取代英伟达,助力新车型实现自动驾驶
美国电动汽车制造商 Rivian 近期宣布了一项重大进展,推出了自研的人工智能芯片、新一代车载电脑及相关 AI 模型。 公司计划在未来的车型中取代目前使用的英伟达芯片系统,以提供更强大的自动驾驶功能支持。 即将上市的 R2款 SUV 将成为首款搭载这款名为 Rivian Autonomy Processor1(RAP1)芯片的车型,并将配备全新的激光雷达传感器。

英伟达发布开放式推理 AI 助力自动驾驶技术迈向新台阶
在近期于圣地亚哥举行的 NeurIPS 大会上,英伟达推出了其最新的自动驾驶 AI 模型 Alpamayo-R1(AR1),旨在加速实现更广泛的无人驾驶汽车。 英伟达称,AR1是全球首个用于自动驾驶的行业级开放推理视觉语言行动(VLA)模型,能够同时处理文本和图像,帮助汽车传感器将所 “看到” 的信息转化为自然语言描述。 AR1结合了推理链 AI 和路径规划技术,能够更好地处理复杂情境。

Rivian大胆追赶特斯拉:自研AI芯片发力四级自动驾驶
周四,电动汽车制造商Rivian在其位于硅谷的办公室举行"人工智能与自动驾驶"活动,宣布正在设计自己的AI芯片以实现完全自动驾驶。 这一虽然姗姗来迟但颇为大胆的举措,旨在追赶在该技术上研发时间更长的特斯拉和其他汽车制造商。 Rivian在活动上推出了自己的专有硅芯片,以及一系列即将推出的自动驾驶功能。

Rivian 发布自研 5nm 智驾处理器 RAP1:双芯模块 INT8 稀疏算力 1600 TOPS
AI在线 12 月 12 日消息,美国“造车新势力”Rivian 在当地时间 11 日举行的其首届自动驾驶与人工智能日活动上宣布推出其自研智驾处理器 RAP1。 RAP1 采用台积电 5nm 制程工艺,每颗芯片的神经引擎具备 800 TOPS 的 INT8 稀疏算力。 在 Rivian 的第三代自主计算机 ACM3 上,两颗 RAP1 间使用 RivLink 低延迟互联,整体算力翻倍,每秒可处理 50 亿像素。
Nvidia 发布新 AI 模型Alpamayo-R1,推动自动驾驶研究向前迈进
近日,Nvidia 在加州圣地亚哥举行的 NeurIPS AI 大会上宣布了一系列新基础设施和 AI 模型,旨在为物理 AI 的发展奠定基础,包括可以感知和与真实世界互动的机器人和自动驾驶车辆。 其中,最引人注目的是 Alpamayo-R1,这是一款专为自动驾驶研究而设计的开放推理视觉语言模型。 Nvidia 称这是首个聚焦于自动驾驶的视觉语言行为模型,能够处理文本和图像,帮助车辆 “看” 到周围环境并做出相应决策。
英伟达发布首个自动驾驶推理模型,押注下一代 AI 大脑
芯片巨头英伟达周一在加州圣地亚哥举行的 NeurIPS 人工智能大会上宣布了新的基础设施和人工智能模型,此举旨在加速构建物理人工智能(Physical AI)的基础技术,该领域包括能够感知现实世界并与之互动的机器人和自动驾驶汽车。 首个自动驾驶推理视觉语言模型亮相英伟达发布了 Alpamayo-R1,这是一款专用于自动驾驶研究的开放式推理视觉语言模型(VLAM)。 该公司声称,这是首个专注于自动驾驶的视觉语言动作模型。
资讯热榜
标签云
AI
人工智能
OpenAI
AIGC
模型
ChatGPT
谷歌
DeepSeek
AI新词
AI绘画
大模型
机器人
数据
Midjourney
开源
Meta
微软
智能
用户
GPT
学习
英伟达
Gemini
智能体
技术
马斯克
Anthropic
图像
AI创作
训练
LLM
论文
AI for Science
代码
腾讯
苹果
算法
Agent
Claude
芯片
具身智能
Stable Diffusion
xAI
蛋白质
人形机器人
开发者
生成式
神经网络
机器学习
AI视频
3D
字节跳动
大语言模型
RAG
Sora
百度
研究
GPU
生成
华为
工具
AGI
计算
生成式AI
AI设计
大型语言模型
搜索
亚马逊
AI模型
视频生成
特斯拉
DeepMind
场景
Copilot
深度学习
Transformer
架构
MCP
编程
视觉