大家好,我是肆〇柒。今天,继续 RL 相关话题,我们来探讨一个在人工智能领域极具应用潜力的话题 —— Multi-Agent Reinforcement Fine-Tuning(MARFT)。这个概念融合了大型语言模型(LLM)、多智能体系统(LaMAS)和强化学习(RL)的精华,为解决复杂任务提供了全新的视角和方法论。
当下,大型语言模型(LLM)正以其卓越的语言理解和生成能力,重塑着人机交互和自主系统的发展版图。从智能写作到语言翻译,从医疗诊断到教育辅导,LLM的应用场景不断拓展,其潜力似乎无穷无尽。然而,当我们尝试将LLM应用于更复杂的任务时,单一智能体的局限性逐渐显现。它可能在处理多步骤推理、跨领域协作和动态环境适应时显得力不从心。这时,多智能体系统(LaMAS)通过多个智能体的协同合作,能够有效分解复杂任务,发挥集体智慧,实现单一智能体难以企及的性能。
强化学习(RL),作为机器学习中驱动智能体通过试错交互来优化行为范式,在提升智能体智能方面展现出独特优势。不同于监督学习依赖标记数据或无监督学习寻找数据模式,RL智能体在与环境互动中,依据奖励信号动态调整策略,以最大化长期回报。这种学习机制使其在游戏、机器人控制等领域屡创佳绩。而强化微调(RFT)作为RL的新兴变体,专注于在少量高质量数据上优化预训练模型,同时保留其原始语言能力,为LLM的性能提升提供了新路径。
MARFT,即多智能体强化微调,巧妙地将RFT拓展至多智能体领域,目的是解决将传统多智能体强化学习(MARL)方法直接应用于LLM基础多智能体系统时所面临的诸多挑战,如训练不稳定、智能体不活跃等。MARFT的出现,为LLM在多智能体系统中的深度应用铺平了道路,也为研究人员提供了一个强大的工具箱。
值得一提的是,MARFT的研究成果已被整理成论文,并配套开源仓库(文末参考资料)。该仓库不仅提供了MARFT框架的基础实现,还支持action-level和token-level优化,方便用户根据自身需求定制环境。这为我们深入理解和应用MARFT提供了宝贵的资源。下面,让我们一同了解一下 MARFT 。
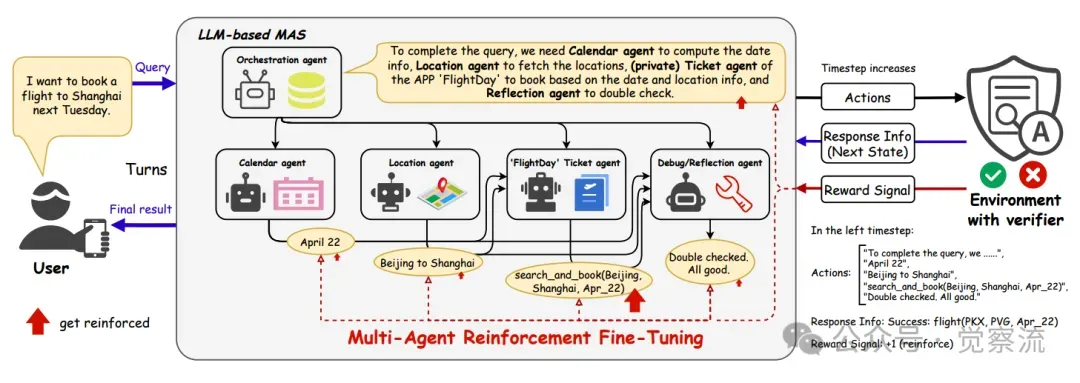
在现实世界智能体问题求解场景中对MARFT的说明
MARFT背景与动机
LLM在多智能体系统中的应用
大型语言模型(LLM)作为新一代自主智能体,凭借其卓越的自然语言理解和生成能力,能够执行复杂的决策、推理,并与动态环境进行交互。它们不仅能够生成流畅自然的语言文本,还能通过整合外部工具和API,完成诸如数据检索、函数调用等操作,极大地拓展了应用边界。例如,在软件开发领域,LLM能够自动生成代码片段,辅助程序员完成繁琐的编程任务;在医疗健康领域,LLM可以分析病历数据,为医生提供诊断建议和治疗方案;在教育领域,LLM化身智能辅导系统,根据学生的学习进度和难点,提供个性化的学习内容和实时反馈。
LLM的强大之处在于其预训练过程中积累了海量的知识和模式,这使其具备了跨领域理解和推理的能力。通过微调和提示工程等技术,可以进一步引导LLM适应特定任务,实现高效的知识迁移和应用。然而,面对复杂度高、步骤多的任务时,单一LLM智能体往往捉襟见肘。此时,多智能体系统(LaMAS)通过将任务分解为多个子任务,分配给不同的智能体协同处理,能够充分发挥各智能体的优势,实现性能的跃升。
强化学习与强化微调
强化学习(RL)是智能体在环境中通过试错学习最优行为策略的关键技术。与监督学习依赖标记数据、无监督学习挖掘数据内在结构不同,RL智能体在与环境交互中,依据环境反馈的奖励信号调整行为,以期获得最大累积奖励。这种机制使RL智能体能够在复杂、不确定的环境中自主学习和适应,展现出强大的泛化能力。
强化微调(RFT)作为RL的新兴分支,聚焦于在少量高质量交互数据上优化预训练模型。与从头开始训练的RL不同,RFT以大规模预训练模型为基础,在保持其原始语言能力的同时,针对性地提升模型在特定任务上的表现。例如,在对话系统中,通过RFT可以优化LLM生成更符合用户需求和对话上下文的回复;在文本摘要任务中,RFT能够使LLM生成更简洁、准确且符合特定风格的摘要。RFT的优势在于充分利用预训练模型的知识基础,仅需在小规模数据上进行优化,大幅降低了训练成本和资源消耗。
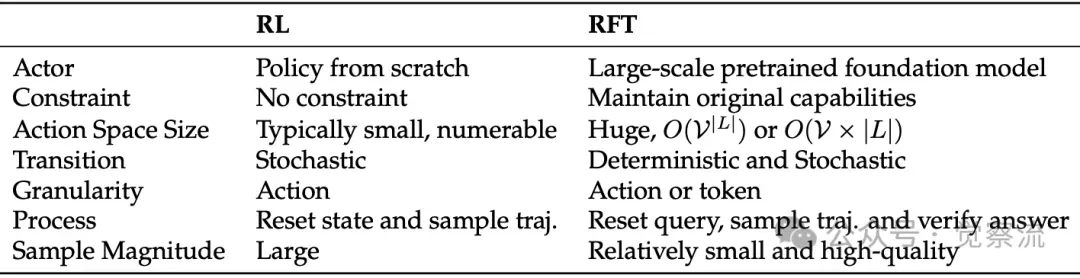
RL(强化学习)与 RFT(强化学习微调)之间的差异
MARFT的必要性
当尝试将传统多智能体强化学习(MARL)方法直接应用于LLM基础多智能体系统(LaMAS)时,诸多挑战接踵而至。首先,训练稳定性问题突出。在多智能体环境中,各智能体的策略相互影响,导致环境动态变化加剧。对于基于梯度更新的RL算法,这种非 stationary 性可能导致训练过程震荡,难以收敛。例如,在智能体协作完成任务时,一个智能体策略的突然变化可能使其他智能体之前学习到的策略失效,引发连锁反应,导致整个系统性能崩溃。
其次,智能体间协作效率低下。传统MARL方法往往假设智能体具备相同的结构和功能,而LaMAS中的智能体可能具有不同的语言模型基础、输入输出格式和任务角色。这使得智能体间的信息交流和协作变得复杂。例如,在一个跨语言的多智能体系统中,部分智能体擅长处理英文信息,而另一些则擅长中文,如何实现高效的信息共享和协作决策成为难题。
此外,通信效率问题也不容忽视。在大规模多智能体系统中,智能体间频繁通信会带来巨大的计算和传输开销。尤其是在移动网络或资源受限的环境中,高频率的通信可能导致系统延迟增加,影响实时性任务的执行。例如,在分布式机器人系统中,多个机器人智能体需要实时共享位置和任务状态信息,但受限于网络带宽和通信协议,可能导致信息传输延迟,影响协同作业效率。
MARFT的出现正是为了解决这些挑战。它通过引入灵活的优化策略和机制,如LoRA(低秩适配)技术,仅对预训练模型的部分参数进行微调,有效降低了训练成本和资源消耗。同时,MARFT还设计了专门的通信和协作机制,以适应LaMAS中智能体的异构性和动态性,提高协作效率。例如,通过设计智能体间的通信协议和信息过滤机制,减少不必要的信息交流,降低通信开销。此外,MARFT还引入了强化学习中的信任域优化方法,确保智能体策略更新的稳定性,避免因策略变化过大导致的系统不稳定。这些创新使得MARFT在提升LaMAS性能方面展现出独特价值,为复杂任务的解决提供了更有效的解决方案。
MARFT的理论基础
从传统RL到RFT
传统强化学习(RL)与强化微调(RFT)在多个关键方面存在显著差异。首先,在目标设定上,传统RL目的是从零开始训练智能体,使其在特定环境中最大化累积奖励。例如,在训练一个机器人智能体执行特定任务时,RL算法会从随机初始化的策略开始,逐步探索环境,学习最优行为策略。而RFT则侧重于在预训练模型的基础上,通过少量高质量的交互数据,进一步优化模型在特定任务上的表现,同时保持其原始的语言生成和理解能力。例如,在对一个预训练的LLM进行RFT时,目标是在不损害其通用语言能力的前提下,提升其在特定领域(如医疗诊断或法律咨询)的问答性能。
在训练过程方面,传统RL通常需要大量的交互数据来训练模型,因为从零开始学习需要充分探索环境的各种状态和行为。这导致训练过程耗时且计算资源消耗巨大。相比之下,RFT利用预训练模型的知识基础,仅需在少量数据上进行优化,大大减少了训练时间和资源需求。例如,一个预训练的LLM可能已经在大规模文本数据上学习了语言的通用模式和结构,RFT只需在特定任务的小规模数据集上进行微调,即可快速适应任务需求。
在环境假设方面,传统RL通常假设环境是完全随机的,智能体的每个动作都会导致环境状态的随机变化。然而,RFT中的环境往往既包含确定性部分(如语言生成中的句子拼接操作)又包含随机性部分(如环境反馈的奖励信号)。这种混合性质使得RFT在处理语言任务时更具挑战性,但也更接近实际应用中的复杂环境。例如,在对话系统中,智能体生成的回复文本是基于语言规则的确定性过程,而用户对回复的满意度(作为奖励信号)则是随机的,取决于用户的主观感受和上下文环境。
RFT的关键实现技术之一是LoRA(低秩适配)。LoRA通过在预训练模型中注入低秩分解矩阵,仅对模型的部分参数进行微调,从而在保持模型稳定性和效率的同时,实现对特定任务的优化。例如,在一个预训练的Transformer模型中,LoRA可以在模型的每一层中添加低秩矩阵,这些矩阵的参数在RFT过程中进行更新,而原始模型的其他参数保持不变。这种方法不仅减少了参数更新的数量,降低了计算成本,还避免了对原始模型结构的大幅改动,保留了其通用的语言能力。
此外,RFT在训练中还会实施散度约束,以确保模型更新的方向与预训练模型保持一致,防止模型在微调过程中偏离原始的语言生成和理解模式。例如,通过引入KL散度约束,限制微调后的模型与预训练模型之间的差异,确保模型在特定任务上的优化不会损害其在其他任务上的性能。这些技术共同保证了RFT在优化特定任务性能的同时,保持了模型的稳定性和泛化能力。
LLM基础的多智能体系统(LaMAS)
LLM基础的多智能体系统(LaMAS)具有独特的结构和特点。首先,LaMAS表现出显著的异构性。不同的LLM智能体可能基于不同的语言模型架构、参数规模和训练数据,导致它们在语言生成、理解能力和任务适应性上存在差异。例如,一些智能体可能擅长处理长文本生成任务,而另一些则在短文本理解和快速响应方面表现出色。此外,LaMAS中的智能体可能具有不同的输入输出格式,如文本、语音或图像,这进一步增加了系统的异构性。
LaMAS的另一个显著特点是其动态组织。在执行复杂任务时,任务可以被分解为多个子任务,分配给不同的智能体协同处理。这种任务分解和分配过程可以根据任务需求和智能体能力动态调整。例如,在一个智能写作系统中,一个智能体负责生成文章的主题句,另一个智能体负责扩展段落内容,而第三个智能体则负责润色语言风格。随着写作任务的进展,智能体之间的协作关系和任务分配可能会发生变化,以适应不断变化的任务需求。
LaMAS还采用异步执行方式。智能体可以根据自己的节奏和任务依赖关系独立执行任务,无需等待其他智能体完成。这种异步性提高了系统的效率和灵活性,尤其是在处理多步骤任务时。例如,在一个软件开发辅助系统中,一个智能体负责代码逻辑设计,另一个智能体负责代码风格检查,它们可以并行工作,无需同步等待,从而加快了整体开发进度。
在LaMAS的优化方法方面,无需调整参数的技术如提示工程(Prompt Engineering)和上下文学习(In-Context Learning)被广泛应用。提示工程通过精心设计的提示文本引导LLM智能体生成符合任务需求的输出。例如,在问答任务中,通过在问题前添加特定的提示文本,如“请以简洁明了的方式回答以下问题”,可以引导LLM生成更符合要求的答案。上下文学习则利用LLM的上下文记忆能力,在不改变模型参数的情况下,通过提供相关上下文信息来调整智能体的行为。例如,在文本续写任务中,通过提供前文的上下文内容,LLM可以生成与前文风格和内容连贯的续写文本。
参数微调方法也在LaMAS中发挥重要作用。例如,多智能体辩论(Multi-Agent Debate)通过智能体之间的互动和辩论,生成高质量的训练数据,用于优化智能体的参数。在这种方法中,多个智能体针对同一问题提出不同的观点和解决方案,通过相互辩论和反驳,智能体能够学习到更全面、准确的知识和推理方法。此外,针对特定任务的编程模块微调(Task-Specific Programming Module Fine-Tuning)可以提升智能体在特定任务上的性能。例如,在代码生成任务中,通过微调智能体的编程模块,使其能够生成更符合编程规范和任务需求的代码。
多智能体强化学习(MARL)
多智能体强化学习(MARL)是强化学习在多智能体环境中的拓展,它为LaMAS的优化提供了理论基础。MARL的基本概念之一是去中心化部分可观测马尔可夫决策过程(DEC-POMDP)。在DEC-POMDP中,多个智能体在环境中独立行动,每个智能体只能观测到部分环境状态,并根据自己的观测和奖励信号做出决策。DEC-POMDP的复杂性在于智能体之间的决策相互影响,且每个智能体都试图在不确定的环境中最大化自己的累积奖励。
MARL的主要方法包括独立学习(Independent Learning)、集中训练分散执行(Centralized Training with Decentralized Execution, CTDE)和通信协调(Communication and Coordination)。独立学习是最直观的方法,每个智能体独立地学习自己的策略,将其他智能体视为环境的一部分。这种方法简单易实现,但存在稳定性问题,可能导致智能体之间的策略冲突和协作失败。例如,在一个合作游戏中,如果每个智能体都独立追求自己的目标,可能会导致团队整体性能不佳。
集中训练分散执行(CTDE)方法在训练阶段,智能体共享全局信息,共同学习一个联合策略。在执行阶段,每个智能体根据自己的观测独立执行策略。这种方法能够充分利用全局信息,提高团队协作性能。例如,MADDPG(Multi-Agent Deep Deterministic Policy Gradient)算法通过引入全局价值函数来协调智能体之间的学习,使智能体在训练过程中能够考虑到其他智能体的行为。然而,CTDE方法在处理大规模智能体系统时可能会面临计算复杂度和通信开销的问题。
通信协调方法则通过设计智能体之间的通信机制,使智能体能够直接交换信息,从而更好地协调行动。例如,CommNet(Communication Network)通过引入一个可训练的通信模块,使智能体能够根据环境状态和任务需求动态调整通信内容和方式。这种方法能够提高智能体之间的协作效率,但设计有效的通信协议和机制是一个挑战。
在LaMAS中应用MARL方法时,需要考虑其适用性和局限性。LaMAS的异构性、动态组织和异步执行等特点使得传统MARL方法难以直接应用。例如,LaMAS中的智能体可能具有不同的输入输出格式和任务角色,这使得集中训练和通信协调变得复杂。此外,LaMAS中的任务分解和分配过程是动态的,需要智能体能够灵活适应任务变化,这与传统MARL中相对固定的环境和任务设置存在差异。因此,MARFT的提出就是为了克服这些局限性,为LaMAS的优化提供更有效的解决方案。
MARFT框架与方法
MARFT概述
为了更好地适应LLM基础多智能体系统(LaMAS)的特点和需求,MARFT引入了Flexible Partially Observable Markov Decision Process(Flex-POMDP)作为其问题表述框架。Flex-POMDP在传统DEC-POMDP的基础上,增加了对智能体间动态依赖关系的建模。通过依赖函数D,MARFT能够明确表示智能体之间的协作和依赖关系,使得智能体在决策过程中能够充分考虑其他智能体的行为和状态。
例如,在一个智能写作系统中,负责生成主题句的智能体和负责扩展段落内容的智能体之间存在明确的依赖关系。负责扩展段落的智能体需要根据主题句智能体的输出来生成连贯的段落内容。Flex-POMDP通过依赖函数D将这种依赖关系纳入模型,使得智能体在决策时能够考虑到这种依赖,从而实现更有效的协作。
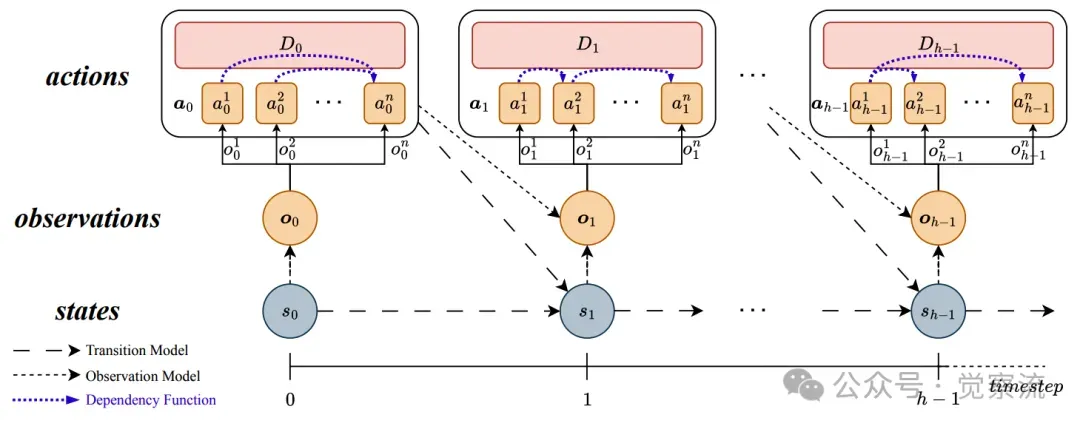
对一个柔性部分可观测马尔可夫决策过程(Flex-POMDP)动态的详细说明。依赖函数(虚线紫色线)可以在不同的时间步长中变化
MARFT还根据参数共享、执行同步性和更新方式对LaMAS进行了细致分类。在参数共享方面,智能体可以选择共享相同的预训练模型,但通过不同的LoRA适配器来实现任务专业化。这种共享机制不仅节省了计算资源,还提高了模型的泛化能力。例如,在一个多语言翻译系统中,所有智能体共享一个预训练的语言模型,但每个智能体通过特定的LoRA适配器来优化特定语言对的翻译性能。
在执行同步性方面,LaMAS可以根据任务需求选择同步或异步执行模式。同步执行适用于任务分解明确、各智能体任务相对独立的场景,而异步执行则更适合任务动态性强、智能体间协作紧密的场景。例如,在一个实时推荐系统中,用户行为预测智能体和商品推荐智能体可能需要异步执行,以快速响应用户行为变化。
在更新方式方面,MARFT支持逐智能体更新和全局更新两种模式。逐智能体更新通过控制训练间隔,使每个智能体在独立的训练周期中更新策略,从而减少非stationary性对训练稳定性的影响。例如,在一个智能客服系统中,负责用户意图识别的智能体和负责回答生成的智能体可以分别进行更新,以适应不断变化的用户需求和对话场景。
MARFT的关键差异与挑战
MARFT与传统多智能体强化学习(MARL)在多个关键方面存在显著差异,这些差异带来了独特的挑战。首先,在动作异步性方面,传统MARL通常假设所有智能体同步执行动作,而LaMAS中的智能体往往根据任务依赖关系异步执行。这种异步性使得智能体在决策时需要考虑其他智能体的潜在行为,增加了决策的复杂性。例如,在一个智能交通系统中,车辆智能体根据交通信号和周围车辆的状态异步调整行驶速度和方向,这要求智能体能够预测其他车辆的行为,以实现安全高效的交通流。
在效用函数方面,传统MARL中的效用函数通常仅关注任务特定的奖励,而MARFT需要在优化任务性能的同时,保持LLM的原始语言能力和通用性。这意味着MARFT的效用函数需要在任务特定奖励和语言能力保持之间进行权衡。例如,在一个智能写作辅助系统中,智能体不仅要生成高质量的文章内容,还要保持语言的自然流畅性和风格一致性。
智能体特性方面,传统MARL中的智能体通常具有相同的结构和功能,而LaMAS中的智能体具有明确的角色和能力配置文件。这些配置文件定义了智能体在任务中的职责和行为模式。例如,在一个智能教育系统中,教师智能体负责提供教学内容和指导,学生智能体负责学习和反馈,它们的行为和决策过程都受到各自角色配置文件的约束。
异构性方面,LaMAS中的智能体可能在模型结构、参数规模、输入输出格式等方面存在差异。这种异构性使得统一的策略学习和协调变得更加困难。例如,在一个跨领域智能问答系统中,不同领域的智能体可能基于不同的知识库和语言模型,如何实现这些异构智能体之间的有效协作是一个挑战。
系统组织方面,LaMAS的组织结构是动态的,可以根据任务需求和智能体能力进行调整。这种动态性要求MARFT能够适应不断变化的系统结构,灵活调整智能体之间的协作关系。例如,在一个智能物流系统中,任务可以根据货物类型、运输路线和时间要求动态分配给不同的智能体,MARFT需要能够实时调整智能体的策略和协作模式,以应对这种动态变化。
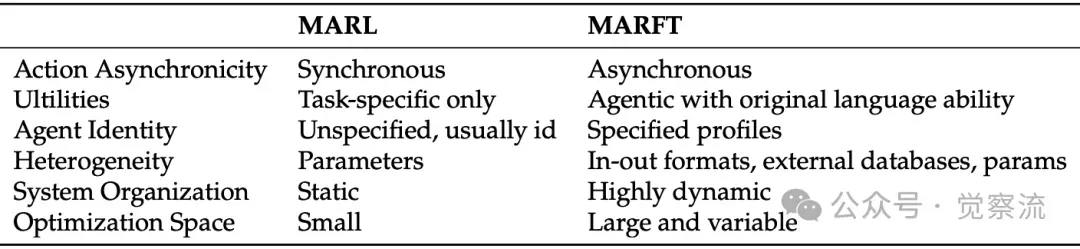
MARFT(多智能体强化微调)与传统 MARL(多智能体强化学习)的区别
MARFT算法实现
MARFT在不同粒度上的实现方法体现了其灵活性和适应性。在action-level MARFT中,智能体将整个动作序列视为一个整体进行优化。例如,在一个智能游戏场景中,智能体需要根据游戏状态生成一系列连贯的动作来完成任务。action-level MARFT通过序列建模技术,将动作序列的生成过程建模为一个马尔可夫决策过程,利用强化学习算法优化智能体的策略。这种方法能够捕捉动作序列之间的长期依赖关系,提高智能体在复杂任务中的表现。
在token-level MARFT中,智能体将动作分解为多个token(如单词或字符),并对每个token进行独立优化。例如,在一个文本生成任务中,智能体可以将文本生成过程分解为逐词生成,每个词的生成都依赖于前一个词的状态和环境反馈。token-level MARFT通过引入token-level别的奖励信号和价值函数,能够更精细地控制文本生成过程,提高生成文本的质量和相关性。这种方法特别适用于需要精确控制文本生成的场景,如诗歌创作或代码生成。
MARFT的核心算法实现了序列建模和信任域学习的结合,以优化智能体策略。以下是action-level和token-level MARFT的核心算法伪代码示例:
action-level MARFT伪代码:
复制初始化智能体策略π和价值网络V
for 每个训练周期:
for 每个时间步:
收集环境观察值ot
for 每个智能体i:
格式化带智能体配置文件的观察值ˆoi
生成动作ai ∼ π(ai|ˆoi, a1:i−1)
执行动作at,获取下一个观察值ot+1和奖励rt
计算优势估计和价值网络目标
更新价值网络V和策略πtoken-level MARFT伪代码:
复制初始化智能体策略π和价值网络V
for 每个训练周期:
for 每个时间步:
收集环境观察值ot
for 每个智能体i:
格式化带智能体配置文件的观察值ˆoi
生成token序列w1, w2, ..., wL ∼ π(w|ˆoi, a1:i−1)
执行动作at,获取下一个观察值ot+1和奖励rt
计算token-level优势估计和价值网络目标
更新价值网络V和策略π在这些算法中,智能体的策略更新过程采用了信任域学习方法,确保策略更新的方向与预训练模型保持一致,防止模型在微调过程中偏离原始的语言生成和理解模式。例如,通过引入KL散度约束,限制微调后的策略与预训练策略之间的差异,保证智能体在特定任务上的优化不会损害其在其他任务上的性能。这种方法的具体实现细节如下:
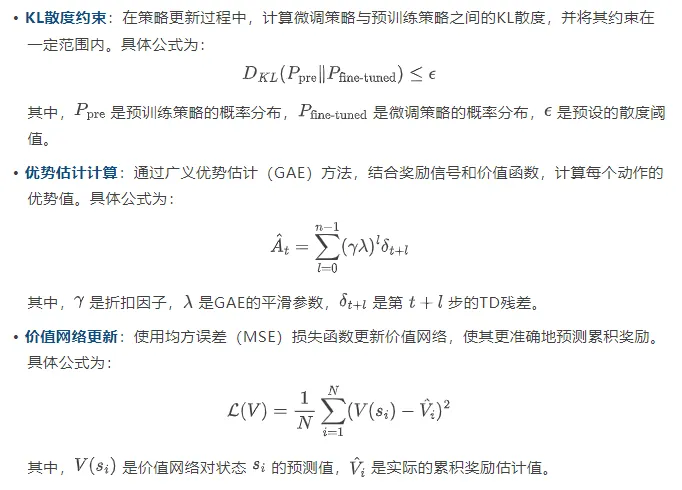
通过这些技术细节的深入解释,读者可以更全面地理解MARFT算法的实现原理和优化策略。

多智能体强化微调的流程。推理和训练以交替的方式进行。基于LLM的MAS中智能体的动态组织取决于依赖函数D。该函数由一个协调智能体或一种路由机制来管理。MAS中的每个智能体都可以拥有自己的私有API、工具池、数据库以及其他资源
MARFT的开源实现
开源仓库概述
MARFT的开源仓库为研究人员和开发者提供了一个全面的框架,用于实现和探索MARFT算法。该仓库的目标是帮助学术界和工业界的研究人员更轻松地过渡到强化学习领域,特别是在多智能体系统和LLM优化方面。通过提供易于使用的工具和灵活的框架,MARFT仓库鼓励研究人员在各种任务和环境中应用和扩展MARFT算法。
核心功能特性
- 动作和token优化:MARFT仓库支持action-level和token-level优化,这使得研究人员可以根据任务的具体需求选择合适的优化粒度。例如,在需要精确控制文本生成的场景中,token-level 优化能够提供更细致的控制;而在关注整体行为序列的任务中,action-level 优化则更为高效。
- 环境扩展:仓库提供了强大的环境扩展工具,方便用户为特定任务创建定制环境。通过简单的配置和代码实现,研究人员可以定义自己的环境逻辑,包括初始化、重置、步骤执行和状态转换等,从而将MARFT应用于各种复杂的应用场景。
- 多适配器支持:MARFT框架允许不同智能体使用同一基础模型但配备不同的LoRA适配器。这种机制不仅节省了计算资源,还使得智能体能够针对特定任务进行优化。例如,在一个多语言对话系统中,不同语言的对话智能体可以共享一个预训练的语言模型,但通过各自的LoRA适配器来优化特定语言的对话性能。
- 逐智能体训练:仓库支持逐智能体训练模式,通过控制训练间隔,使每个智能体在独立的训练周期中更新策略。这种训练方式能够减少非stationary性对训练稳定性的影响,提高学习效率。例如,在一个智能客服系统中,负责用户意图识别的智能体和负责回答生成的智能体可以分别进行更新,以适应不断变化的用户需求和对话场景。通过设置 --agent_iteration_interval 参数,研究人员可以灵活控制每个智能体的训练间隔。
- 恢复训练:MARFT仓库还提供了恢复训练功能,这在训练过程中遇到崩溃或中断时尤为重要。通过指定 --load_path 参数,研究人员可以加载之前保存的检查点,包括LoRA适配器参数和价值网络模型 critic.pth。这一功能确保了训练过程的连续性和稳定性,避免了从头开始训练所带来的资源浪费。
快速入门指南
安装步骤:
1. 创建虚拟环境:
复制conda create -n marft conda activate marft
2. 克隆仓库并安装依赖:
复制git clone https://github.com/jwliao-ai/MARFT.git cd MARFT pip install -r requirements.txt
注意:在安装过程中,可能需要根据您的CUDA版本调整软件包版本,以确保兼容性。
环境扩展示例
为了帮助研究人员快速上手,MARFT仓库提供了详细的环境扩展示例。以下是一个简单的自定义环境实现代码示例:
复制class CustomEnv:
def__init__(self):
# 初始化环境
pass
defreset(self):
# 重置环境状态
pass
defstep(self, action):
# 定义环境对动作的响应
pass
deftransition(self, state):
# 定义状态转换
pass在这个示例中,__init__ 方法用于初始化环境,reset 方法用于重置环境状态,step 方法定义了环境对智能体动作的响应,而 transition 方法则描述了状态转换逻辑。通过实现这些方法,研究人员可以轻松地将MARFT应用于自己的任务环境中。
此外,仓库中还提供了环境扩展的详细文档和示例代码,指导用户如何创建复杂的动态环境。例如,如何设计一个能够实时反映交通流量变化和道路状况的智能交通环境,包括环境的初始化、状态更新、奖励计算等关键步骤。这些资源能够帮助用户快速掌握环境扩展的技巧,将MARFT应用于实际的多智能体任务中。
多适配器与逐智能体训练
多适配器机制是MARFT的一个重要特性。通过为每个智能体配备不同的LoRA适配器,智能体可以在共享基础模型的同时,针对特定任务进行优化。例如,在一个多语言对话系统中,不同语言的对话智能体可以共享一个预训练的语言模型,但通过各自的LoRA适配器来优化特定语言的对话性能。这种机制不仅提高了模型的资源利用效率,还增强了系统的可扩展性。
逐智能体训练模式则通过控制训练间隔,使每个智能体在独立的训练周期中更新策略。这种训练方式能够减少非stationary性对训练稳定性的影响,提高学习效率。例如,在一个智能客服系统中,负责用户意图识别的智能体和负责回答生成的智能体可以分别进行更新,以适应不断变化的用户需求和对话场景。通过设置 --agent_iteration_interval 参数,研究人员可以灵活控制每个智能体的训练间隔。仓库中提供了详细的训练日志和监控工具,帮助用户实时跟踪每个智能体的训练进度和性能表现。
恢复训练机制
恢复训练功能是MARFT仓库中的一个重要特性,它能够帮助研究人员在训练过程中遇到崩溃或中断时,从中断处继续训练。通过指定 --load_path 参数,研究人员可以加载之前保存的检查点,包括LoRA适配器参数和价值网络模型 critic.pth。这一功能确保了训练过程的连续性和稳定性,避免了从头开始训练所带来的资源浪费。
此外,仓库还提供了自动保存机制,根据训练进度和性能指标定期保存检查点。这不仅方便了训练过程中的故障恢复,还为模型的选择和比较提供了便利。例如,用户可以通过对比不同训练阶段的检查点,评估模型的性能变化,选择最优的模型进行部署和应用。
MARFT的实验与评估
实验设置
为了评估MARFT的性能,研究者设计了一系列实验,主要基于数学问题解决环境(MATH)。这个环境包含了多种类型的数学问题,每个问题都有一个唯一的答案。在实验中,随机从数据集中采样一个(问题,答案)对,初始化环境。智能体需要根据问题生成答案,环境会根据答案的正确性给予奖励。如果答案正确,智能体获得奖励1;否则,奖励为0。我们可以为单智能体和双智能体系统分别设计不同的配置文件,以评估MARFT在不同场景下的表现。
每个智能体的配置文件包括其角色定义、提示模板和任务特定参数。例如,单智能体配置文件定义了一个全能型智能体,负责从问题分析到答案生成的整个过程;而双智能体系统则包括一个分析智能体和一个解答智能体,前者负责问题分解和推理步骤生成,后者负责基于推理步骤生成最终答案。这些配置文件通过JSON格式定义,便于用户根据自己的任务需求进行修改和扩展。
实验结果与分析
在实验中,对比了单智能体和双智能体系统在行动级和token-level MARFT方法下的表现。以下是实验结果的可视化展示:
准确率变化曲线:
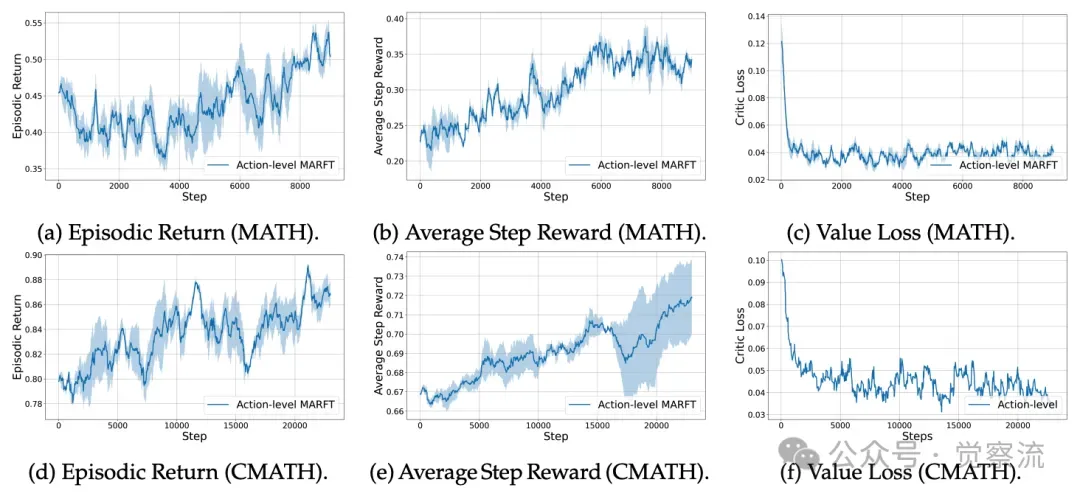
在双智能体 MARFT 过程中的学习动态(基于3个随机种子计算得出)从图中可以看出,双智能体系统在训练过程中逐渐超过了单智能体系统,最终达到了约50%的准确率,比单智能剂系统高出约5%。这表明MARFT在多智能体系统中能够更好地利用智能体间的协作,提高问题解决的准确性。特别是在训练后期,双智能体系统的准确率增长更为平稳,显示出更强的泛化能力和稳定性。损失函数变化曲线:
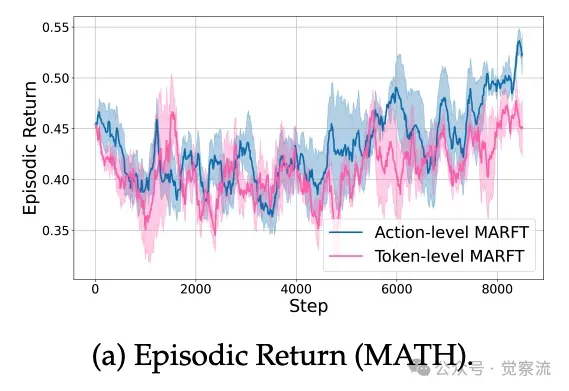
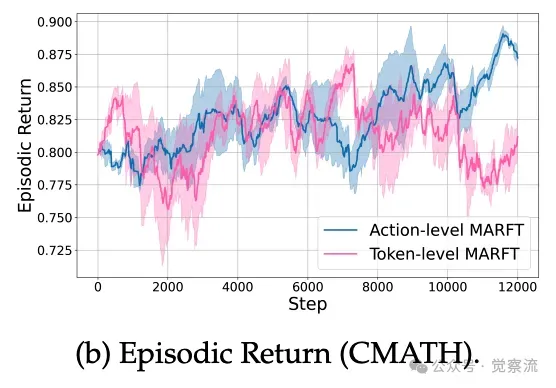
在不同优化粒度下双智能体 MARFT 的阶段性回报曲线(基于3个随机种子计算得出)
从损失函数的变化趋势来看,MARFT方法在训练过程中表现出更好的稳定性。与单智能体PPO方法相比,MARFT的损失函数波动较小,收敛速度更快。这说明MARFT在优化过程中能够更有效地利用预训练模型的知识基础,减少训练过程中的不稳定性和资源消耗。例如,单智能体PPO方法在训练初期损失函数波动剧烈,导致训练过程不稳定,而MARFT通过逐智能体更新和信任域约束,显著降低了这种波动。
此外,研究者还对MARFT与传统MARL方法(如MADDPG、MAPPO)进行了性能对比。实验结果显示,MARFT在相同环境下的准确率比MADDPG高出约10%,比MAPPO高出约7%。这表明MARFT通过引入RFT技术和针对LaMAS的优化策略,能够更好地处理多智能体系统中的复杂任务。
尽管MARFT在当前实验中展现出了显著的优势,但仍有进一步探索的空间。未来,还可以在更广泛的数学和编码任务上应用MARFT,包括多步MARFT实验。例如,在数学问题解决任务中,可以尝试引入更复杂的多步推理场景,评估MARFT在处理长序列任务时的表现。此外,还可以进行超参数敏感性分析,探索不同超参数配置对MARFT性能的影响。这将有助于我们找到更优的训练策略,提高MARFT在不同任务和环境中的适应性。同时,还可以尝试扩展LaMAS群体规模,研究MARFT在更大规模智能体系统中的性能和挑战。这将为MARFT在实际应用中的大规模部署提供理论支持和实践指导。
MARFT的前景与挑战
MARFT的强大能力
MARFT在解决复杂任务方面展现出了巨大的潜力。通过动态任务分解和智能体间协作,MARFT能够有效提高系统性能。例如,在医疗诊断场景中,MARFT可以将复杂的诊断任务分解为多个子任务,如症状分析、检查结果解读和治疗方案推荐。不同的智能体可以根据自身专长处理这些子任务,并通过协作生成最终的诊断结果。这种协作方式不仅提高了诊断的准确性,还加快了诊断速度。
在教育领域,MARFT可以应用于教育资源个性化和智能辅导系统。例如,一个智能体可以根据学生的学习进度和知识掌握情况,生成个性化的学习路径;另一个智能体则可以实时提供学习内容的讲解和反馈。通过智能体间的协作,系统能够更好地满足学生的学习需求,提高学习效果。
MARFT还具有显著的可扩展性。随着任务复杂度和智能体数量的增加,MARFT能够灵活调整智能体之间的协作关系和任务分配,确保系统的高效运行。此外,MARFT在隐私保护方面也具有独特优势。由于智能体之间不共享数据,仅通过行为和奖励信号进行协作,这使得MARFT能够有效保护用户的隐私和数据安全。
在区块链技术集成方面,MARFT的去中心化特性和隐私保护机制使其成为区块链应用的理想选择。例如,在智能合约执行中,MARFT可以协调多个智能体验证交易,管理去中心化自治组织(DAO)或优化去中心化金融(DeFi)平台的资源分配。MARFT的动态适应性能够确保在区块链这种不确定和对抗性强的环境中,系统能够稳定运行并保持高性能。
面临的挑战
尽管MARFT具有诸多优势,但仍面临一些挑战。首先,缺乏动态训练环境是一个关键问题。目前,虽然有一些“动态”基准测试环境,但将这些环境转化为支持MARL训练的动态环境仍是一个未解决的问题。例如,在一个智能交通系统中,如何设计一个能够实时反映交通流量变化和道路状况的动态环境,是一个极具挑战性的任务。这不仅需要精确的环境建模,还需要高效的奖励信号设计,以引导智能体学习最优行为策略。
其次呢,样本效率低下是MARFT面临的另一个问题。强化学习,尤其是基于策略梯度的方法,通常需要大量的样本数据来训练模型。然而,对于LLM这样的复杂模型,获取大量高质量的样本数据既耗时又资源密集。例如,在一个智能写作系统中,为了训练智能体生成高质量的文章,需要大量的标注数据来提供奖励信号。这不仅增加了训练成本,还可能导致训练过程缓慢。因此,提高样本效率,开发能够有效利用有限样本数据的算法,是MARFT未来发展的重要方向。
还有很重要的,缺乏高质量合成数据也是一个需要解决的问题。在多智能体系统中,有效的训练需要高质量的合成数据来模拟智能体之间的交互和协作。然而,目前在多智能体LLM交互领域,缺乏这样的合成数据集。例如,在一个智能客服系统中,如何生成高质量的对话数据来模拟用户与智能体之间的交互,是一个关键问题。这不仅需要数据的多样性和真实性,还需要数据能够反映智能体之间的协作关系和任务依赖。
总结
MARFT在整合强化微调(RFT)、LLM基础多智能体系统(LaMAS)和多智能体强化学习(MARL)方面做出了重要贡献。它不仅有效解决了将传统MARL方法应用于LaMAS时所面临的挑战,还通过引入灵活的优化策略和机制,显著提升了LLM基础多智能体系统在复杂任务中的性能。MARFT在可扩展性、隐私保护和区块链技术集成方面的潜力,使其在实现通用人工智能(AGI)的道路上展现出广阔的应用前景。
然而,MARFT的发展仍面临诸多挑战,如缺乏动态训练环境、样本效率低下和缺乏高质量合成数据等。未来的研究方向包括创建统一的基准和开发工具包、构建高质量合成数据集以及设计混合学习策略,以提高MARFT的效率和适用性。
参考资料
- MARFT: Multi-Agent Reinforcement Fine-Tuning
https://arxiv.org/pdf/2504.16129
- MARFT 开源仓库
https://github.com/jwliao-ai/MARFT