3D Gaussian Splatting (3DGS) 是一种日益流行的新视角合成方法,给定 3D 场景的一组带位姿的图像(即带有位置和方向的图像),3DGS 会迭代训练一个场景表示,该表示由大量各向异性 3D 高斯体组成,用以捕捉场景的外观和几何形状。
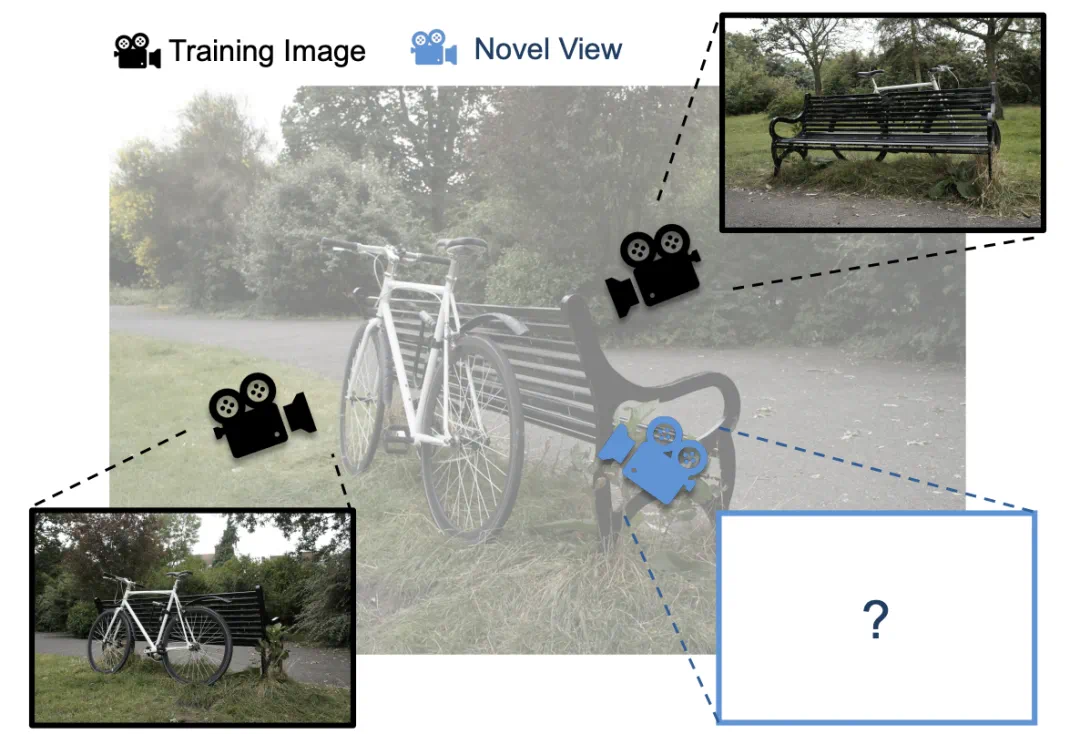
用户可以使用训练好的场景表示来渲染先前未见过的视角的图像。与其他新视角合成方法相比,3DGS 具有更快的渲染时间,同时能达到相当的图像质量,因此迅速普及开来。
3DGS 在当下的 3D 建模、数字孪生、影视制作 (VFX)、VR/AR 与机器人视觉重建 (SLAM) 等领域已展现出革命性的应用潜力。
使用 3DGS 渲染的图像质量取决于所训练场景表示的保真度。捕捉大面积区域或包含复杂细节的场景需要更多的高斯体。因此,3DGS 的内存占用会随着场景大小、场景复杂性或输出图像分辨率的增加而增长。
顶尖水平的 3DGS 实现运行在 GPU 上,而 GPU 的显存并不充裕。因此,在扩展 3DGS 并将其应用于具有高图像分辨率的大型复杂场景时,显存容量已成为一个障碍。
谢赛宁团队提出了 CLM 系统,该系统允许 3DGS 使用单块消费级 GPU(例如 RTX 4090)渲染大型场景。
论文标题:CLM: Removing the GPU Memory Barrier for 3D Gaussian Splatting
论文地址:https://arxiv.org/abs/2511.04951v1
CLM 的设计基于这样一种洞察:3DGS 的计算本质上是稀疏的,即每次训练迭代只访问场景高斯体的一个小子集。因此,只需将这个子集加载到 GPU 内存中,而将其余的高斯体卸载到更充裕的 CPU 内存中即可。
为了提高性能并减少通信开销,CLM 基于对 3DGS 内存访问模式的深入理解,采用了一种新颖的卸载策略。该策略利用了关于 3DGS 训练流水线的四个观察,最大限度地减少了性能开销并能扩展到大型场景:
访问集的提前计算: 每个视角(一张训练图像)所访问的高斯体集合可以提前计算出来,这使得加载一次迭代所需的高斯体可以与上一次迭代的计算重叠进行。
重叠缓存:不同视角访问的高斯体之间存在大量重叠,这使研究者能够缓存重叠的高斯体,以减少每次训练迭代期间的通信量。
空间局部性:训练过程表现出空间局部性;同一区域中的视角倾向于访问相同的高斯体。因此,可以仔细安排训练迭代,以最大化重叠访问并最小化总体通信量。
重叠计算:进一步利用空间局部性来重叠梯度计算和大部分的高斯参数更新。
评估表明,由此产生的实现可以在单个 RTX 4090 上渲染一个需要 1.02 亿个高斯体的大型场景,并达到顶尖水平的重建质量。
此外当渲染可以装入基线系统 GPU 显存的小型场景时,与没有卸载的基线系统相比,CLM 针对 3DGS 的特定卸载解决方案仅产生适度的性能开销。
方法:基于稀疏性的卸载策略
团队通过将部分高斯点参数存储在固定页主内存中,并在需要时动态加载到 GPU 内存,从而解决了前面提到的挑战。此外,团队还充分利用了 3DGS 的若干独特特性,以显著降低卸载带来的通信开销。
3DGS 计算具有高度稀疏性
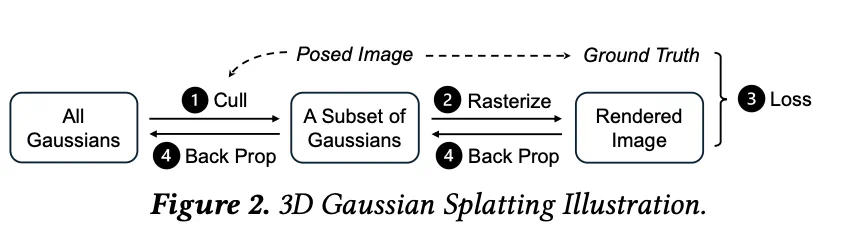
3DGS 的计算过程是稀疏的:在渲染(无论是训练阶段还是推理阶段)时,只有场景中一小部分高斯点会被实际使用。这是因为每个视角都对应一个相机位姿,只有位于相机视锥体(frustum)内的高斯点才可能对最终渲染图像产生贡献(如下图所示)。
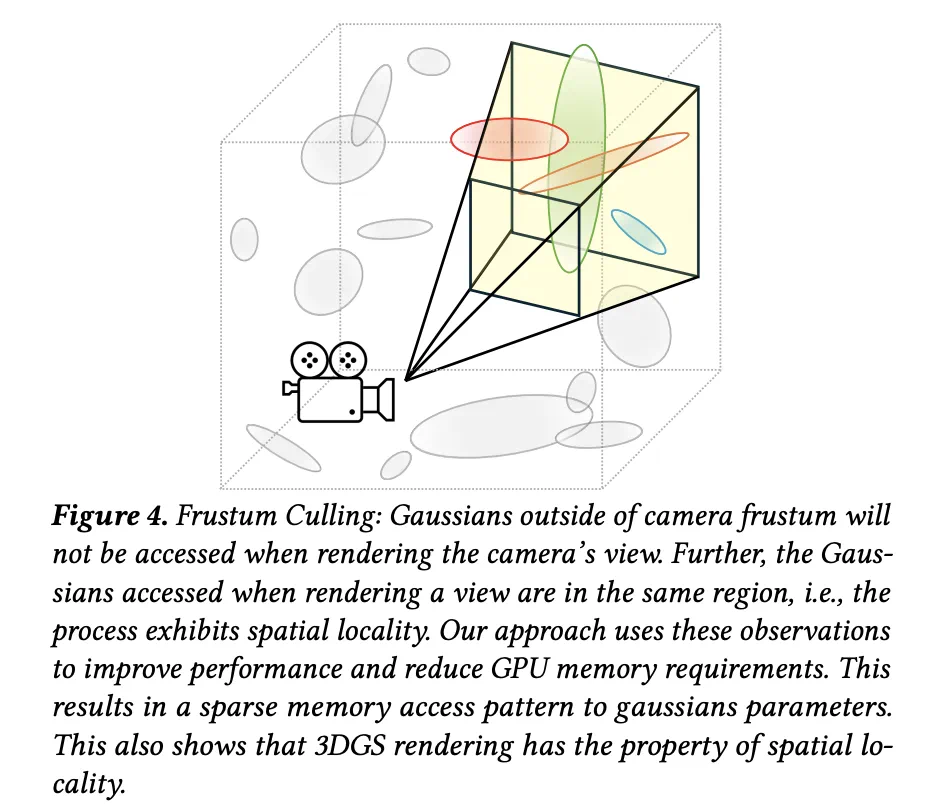
而事实上,3DGS 的渲染流程在处理某个视角之前,会显式计算出该视角内的高斯集合,然后再对这些高斯点进行渲染处理(如下图所示)。
实验发现,在大场景中,单个视角访问的高斯点数量占比通常不到 1%,可通过计算场景中视角 i 的稀疏度 来量化这一点:
来量化这一点: ,其中,
,其中, 是视角 i 所涉及的高斯点集合,N 是高斯点的总数。
是视角 i 所涉及的高斯点集合,N 是高斯点的总数。
结果表明:场景越大,其稀疏度越高(即 ρ 越小)。这符合预期,因为虽然高斯点数量会随场景规模增大而增加,但相机视锥体所覆盖的体积与场景整体大小无关。
在最大的数据集上,团队发现:
每个视角平均只访问了 0.39% 的高斯点;
单个视角访问的高斯点数量上限为 1.06%。
团队利用这种稀疏性,通过 3DGS 的视锥剔除(frustum culling)逻辑,提前识别出每个视角(以及其对应的 microbatch)所需的高斯点子集,并仅将这些必要的高斯点传输至 GPU,从而显著降低内存占用与数据传输量。
视角间的稀疏模式具有空间局部性
同一场景的不同视角,其稀疏模式虽不同,但存在重叠。换句话说,对于视角 i 和 j, ,但它们的交集
,但它们的交集 中的高斯点数,与这两个视角之间的空间位置与角度相似度密切相关。
中的高斯点数,与这两个视角之间的空间位置与角度相似度密切相关。
团队利用这种空间局部性(spatial locality),来优化 CPU 与 GPU 之间的数据传输:
microbatch(微批次)调度优化:提前计算每个 microbatch 的稀疏模式,并合理安排它们的处理顺序,使得相邻批次之间的访问模式尽可能重叠,从而提高缓存命中率。
GPU 缓存机制:将连续 microbatch 中频繁访问的高斯点保存在 GPU 缓存中,从而减少重复的数据传输,显著降低通信开销。
稀疏模式的高效计算
在传统 3DGS 实现中,所有高斯点参数被存储在单个张量中,并且在 GPU 上执行视锥剔除以确定某个视角的稀疏模式。然而,这种做法要求所有高斯点都预先加载到 GPU 内存,这与「仅加载必要高斯点」的设计目标相冲突。
因此,团队通过仅使用部分高斯信息来预估稀疏模式,避免了不必要的 GPU 内存占用,为后续的高效卸载与缓存策略奠定了基础。
系统设计
CLM 的核心思路是:通过将高斯参数和部分优化器计算卸载到 CPU 端,来扩展有效的 GPU 显存容量;同时基于 3DGS 稀疏性和空间局部性的观察结果,最大限度地减少 GPU-CPU 通信与 CPU 计算的开销。
目前 CLM 的实现基于 CUDA,但其设计与渲染后端无关,也可移植到 Vulkan 平台。
整体来看,CLM 的训练流程基本是这样进行的:首先,CLM 选取一批训练图像及其对应视角,并使用视锥剔除计算出每个视角 i 所需的高斯集合  ,可将其称为「视锥内高斯」(in-frustum Gaussians)。
,可将其称为「视锥内高斯」(in-frustum Gaussians)。
接着,将一个 batch 划分为多个 microbatch(微批次),以便在训练中启用流水线执行。更重要的是,CLM 根据视锥剔除的输出结果,优化 microbatch 的执行顺序,以最大化空间局部性。
最后,每个 microbatch 在流水线中执行,使得通信与计算(GPU 与 CPU)能够重叠进行。
具体而言:处理 microbatch 时,CLM 会将所需的视锥内高斯加载到 GPU 内存,通过 Gaussian Caching(高斯缓存机制) 避免重复加载连续 microbatch 中共享的高斯点。之后 GPU 执行前向与反向传播,梯度被传回 CPU,而一个并行 CPU 线程执行 Adam 优化器,更新高斯参数。
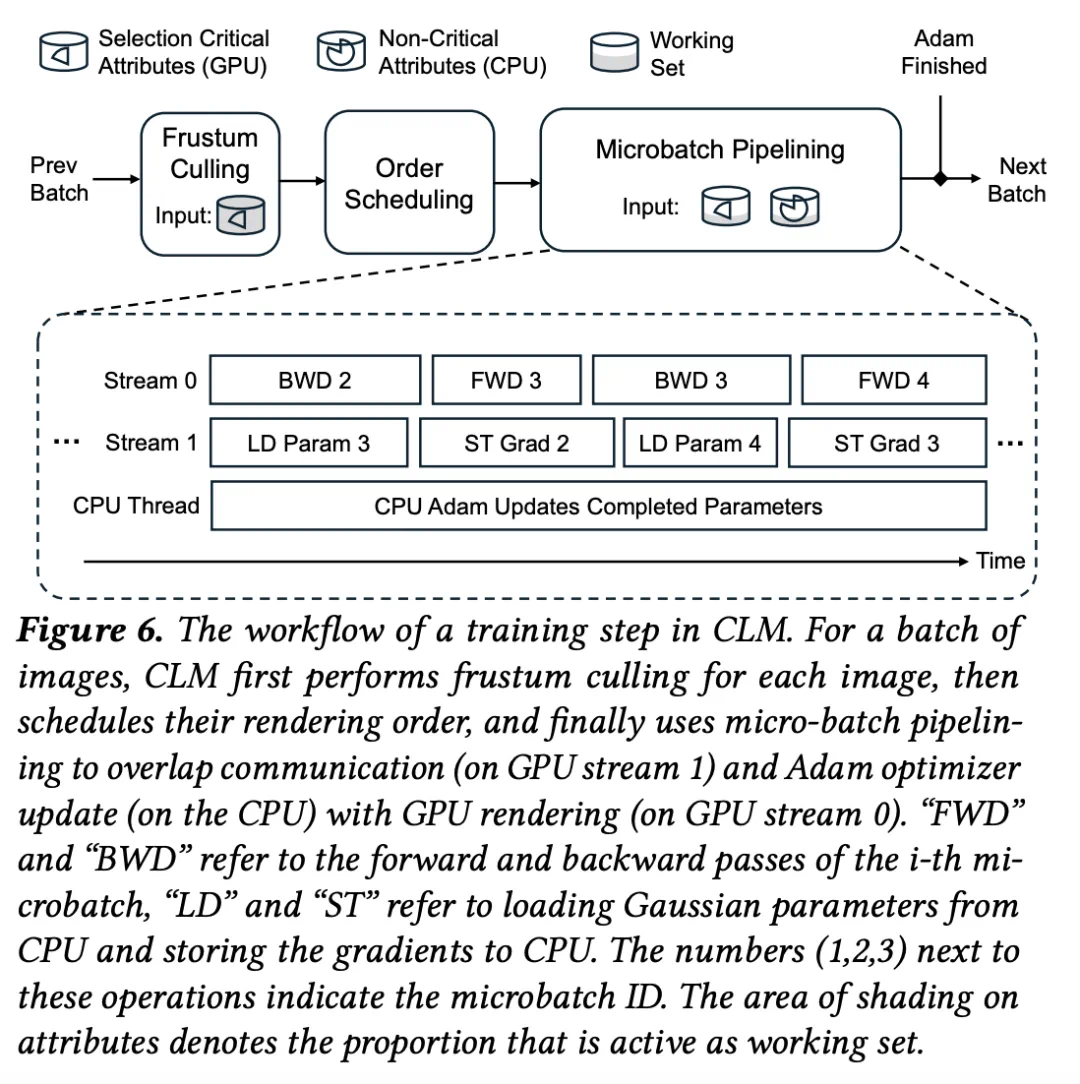
如上图所示:
加载 microbatch i 的视锥高斯时,与 microbatch i−1 的 GPU 反向计算重叠;
传输 microbatch i 的梯度时,与 microbatch i+1 的 GPU 前向计算重叠。
而对于那些在某个 microbatch 中最后被更新的高斯点,CLM 会在 CPU 上完成其对应的 Adam 更新,并与后续microbatch的 GPU 前向 / 反向计算并行执行。
经过一系列的实验、评估,可以发现:CLM 具备更大规模的模型训练能力,通过将部分计算与数据卸载至 CPU,CLM 使得 3DGS 的可训练模型规模相比纯 GPU 训练基线提升了最高 6.1 倍;更高的重建质量,CLM 能够训练更大的模型,从而提升场景重建精度;更低的通信与卸载开销。
了解更多详细内容,请参考原论文!