
作为 SIGGRAPH 系列的两大主会之一,SIGGRAPH Asia 是毫无争议的 “天花板级会议”。每年,这里汇聚了全球顶尖的研究团队,展示着计算机图形学、3D 视觉、计算机辅助设计及数字化制造等领域的最新突破,指引着学术界与工业界的技术风向。在 2025 年的评审中,大会共收到 1,106 篇技术论文投稿,最终录用 201 篇会议论文和 100 篇期刊(ACM Transaction on Graphics)论文。其中,获得 “最佳论文奖”(Best Paper Awards)的仅有 5 篇。
论文标题:Curve-Based Slicer for Multi-Axis DLP 3D Printing
项目主页:https://chengkai-dai.github.io/curved_dlp_slicer/
论文链接:https://dl.acm.org/doi/10.1145/3763352
过去几年,消费级 3D 打印的普及有点像一场 “悄悄发生的产业级爆炸”。从桌面 FDM 到越来越亲民的光固化(DLP/SLA),从手办模型到小型功能件,3D 打印正在成为设计师与工程师手中的 “新型生产力”。随之而来的是一个有趣的趋势:科研界的关注点正在发生转移 —— 人们不再仅仅满足于用 GenAI 生成一个漂亮的 3D 模型,更在意它能不能在现实世界中被 “完美” 地制造出来 。毕竟,屏幕上再精美的模型,一旦打印出来满身支撑、表面全是粗糙的层纹,甚至物理性能也因层间结构缺陷而受损,其实用价值和美学价值都会大打折扣 。
这也是为什么今年 SIGGRAPH Asia 2025 将 “最佳论文” 颁给了一项与 3D 打印直接相关的工作。这项由香港中文大学和曼彻斯特大学团队带来的研究《Curve-Based Slicer for Multi-Axis DLP 3D Printing》,提出了一种可微优化的全新切片计算框架 ,重新定义了 DLP 3D 打印的切片过程。研究团队将随机梯度下降(SGD)等常用于训练神经网络的数学工具迁移至制造领域 ,将传统的几何切片生成转化为一个连续的轨迹优化问题 。该方法通过计算最优的空间贝塞尔曲线来引导机械臂运动 ,在实现复杂几何结构无支撑制造的同时 ,有效改善了因层间角度偏差导致的表面层纹问题(如视频所示) 。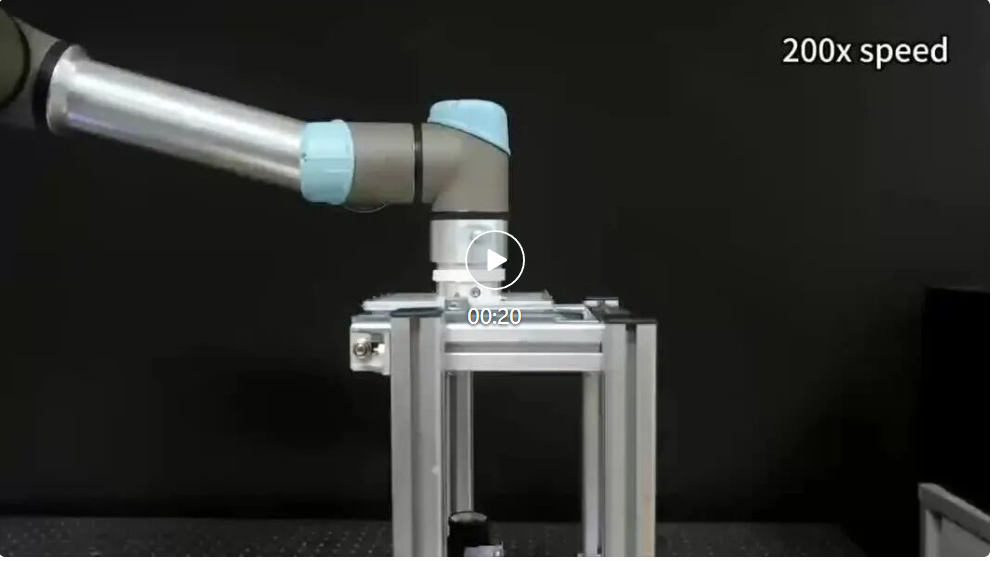
这不仅是 3D 打印技术的突破,更是AI、机器人与制造(Fabrication)深度融合的一个范本。
传统 DLP 3D 打印的物理局限
DLP(Digital Light Processing,数字光处理)打印的核心原理,是利用投影仪将紫外光图案投射到液态树脂槽底部,通过光聚合反应逐层固化材料。得益于其高分辨率和快速成型的特点,DLP 打印已广泛医疗与生物工程、牙科修复、珠宝制造等领域。
然而,这种主流 3D 打印技术长期以来一直被一种物理限制所束缚:固定平面切片。
传统 DLP 系统通常依赖单轴垂直运动,这意味着每一层都必须是平行于构建平台的二维平面 。这种 “千层饼” 式的堆叠方式,在面对日益复杂的几何设计时,暴露出了两个难以克服的物理挑战:
1. 悬垂与支撑:如果模型的某个部分 “突出来” 太多,或者凭空出现(悬浮点),就必须加支撑结构,否则打印件会掉下来 。这些支撑不仅浪费材料,拆除后还会留下难看的疤痕。
2. 明显的层纹:这就像我的世界里的山坡,当模型表面有弧度时,平行的切片必然会在表面形成像梯田或等高线一样的纹路,破坏了原本光滑的曲面 。
为了解决这个问题,学术界引入了 “多轴” 概念 —— 如果让构建平台装在机械臂或者高自由度运动平台上上,它就可以随意旋转,如下图所示。这样,我们在打印不同部位时,可以调整角度,让打印层始终 “贴合” 模型表面,甚至完全避开悬垂结构。
然而,引入多轴自由度也带来了极高的计算复杂度:如何规划一条可制造的运动轨迹?
在多轴系统下,切片不再是简单的几何截面计算,而演变成了一个受到严格物理约束的机器人运动规划问题 。算法必须在生成切片的同时,实时处理多个维度的耦合约束:每一层切在哪?机械臂怎么动才不会撞到树脂槽?如何保证上一层和下一层连得上?
针对这些挑战,现有的解决方案通常是确定性的几何规则,比如基于骨架线或者手动分割区域 。而本文工作的核心贡献,在于打破了这种离散的几何规则,将切片生成与路径规划统一转化为一个端到端的数学优化问题 。通过构建一个包含几何、物理和制造约束的综合目标函数,算法能够在连续的解空间中自动搜索出最优的打印策略。
核心思想:一切皆可 “微分”
这项工作的核心突破,在于摒弃了传统切片算法中基于离散平面的几何计算逻辑,转而构建了一个基于连续曲线的微分优化框架。
研究团队提出,多轴打印的运动轨迹不应被视为一系列静态平面的集合,而应被参数化为一条连续的贝塞尔曲线(Bézier Curve) 。
。
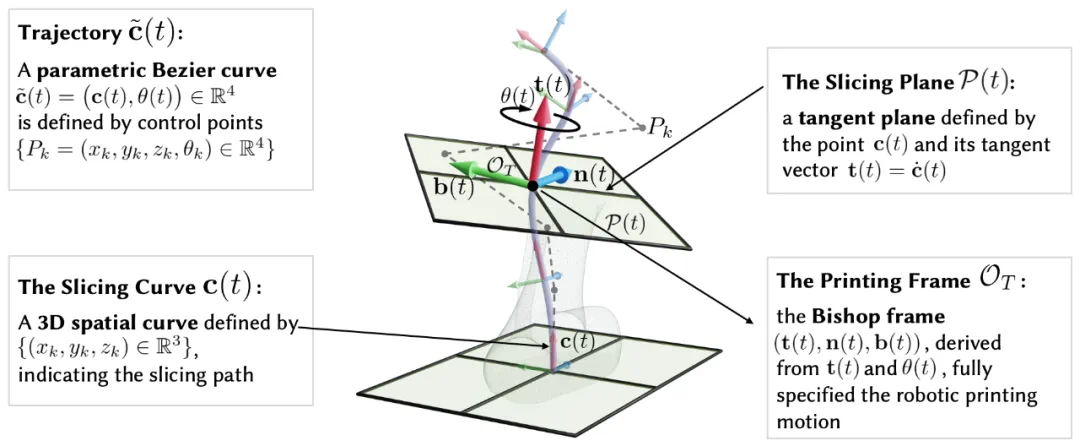
如图所示,这种参数化表征将复杂的制造过程分解为了一组清晰的几何定义:
空间路径 c(t):由控制点
 的前三维坐标
的前三维坐标  决定,代表打印平台在空间中的移动轨迹。
决定,代表打印平台在空间中的移动轨迹。切片平面
 :曲线上任意一点c(t)处的切线方向t (t),即为该处切片平面的法向量。这意味着,只要改变曲线的形状,切片的方向就会随之平滑改变。
:曲线上任意一点c(t)处的切线方向t (t),即为该处切片平面的法向量。这意味着,只要改变曲线的形状,切片的方向就会随之平滑改变。打印标架
 :为了防止法向量退化并确保运动平滑,研究使用了Bishop 标架 (t, n, b),并引入了第四维变量
:为了防止法向量退化并确保运动平滑,研究使用了Bishop 标架 (t, n, b),并引入了第四维变量  来控制围绕切线方向的旋转自由度,从而完全确定了机械臂的末端执行器姿态 。
来控制围绕切线方向的旋转自由度,从而完全确定了机械臂的末端执行器姿态 。
通过这种方式,原本离散的 “制造问题” 被转化为了一个标准的数学优化问题:我们在解空间内寻找一组最优的控制点  ,使得包含了所有制造目标的总损失函数最小化。
,使得包含了所有制造目标的总损失函数最小化。
核心优化方程
系统的目标函数可以被形式化地写为:

其中, 是我们需要优化的参数(即贝塞尔曲线控制点),
是我们需要优化的参数(即贝塞尔曲线控制点), 是输入的 3D 模型。
是输入的 3D 模型。
为了让这个方程可解,研究团队利用Adam 优化器和现代深度学习框架中的自动微分机制,将物理制造约束拆解为 “软目标”(Soft Objectives)和 “硬约束”(Hard Constraints)两部分:
1. 软目标函数  :追求更高的质量
:追求更高的质量
这部分包含希望 “尽可能好” 的指标,由权重 w 进行平衡:
 (Cliff-Angle Loss, 无支撑优化):为了避免打印过程中出现大角度悬垂,算法极小化 “悬垂角”。数学上表现为最大化模型表面法向量
(Cliff-Angle Loss, 无支撑优化):为了避免打印过程中出现大角度悬垂,算法极小化 “悬垂角”。数学上表现为最大化模型表面法向量  与局部打印方向 d(q) 的正交性。当两者夹角超过材料特定的阈值
与局部打印方向 d(q) 的正交性。当两者夹角超过材料特定的阈值  时,Loss 会急剧增加。
时,Loss 会急剧增加。
 (Surface Quality Loss, 表面质量优化):针对用户关注的重点区域(如手办模型中的人脸),算法驱动切片平面的法向与模型表面法向
(Surface Quality Loss, 表面质量优化):针对用户关注的重点区域(如手办模型中的人脸),算法驱动切片平面的法向与模型表面法向  保持一致,从数学上消除了阶梯效应的几何成因。
保持一致,从数学上消除了阶梯效应的几何成因。
2. 硬约束函数  :确保物理可行性
:确保物理可行性
这部分包含 “必须满足” 的物理约束,在优化中作为惩罚项处理:

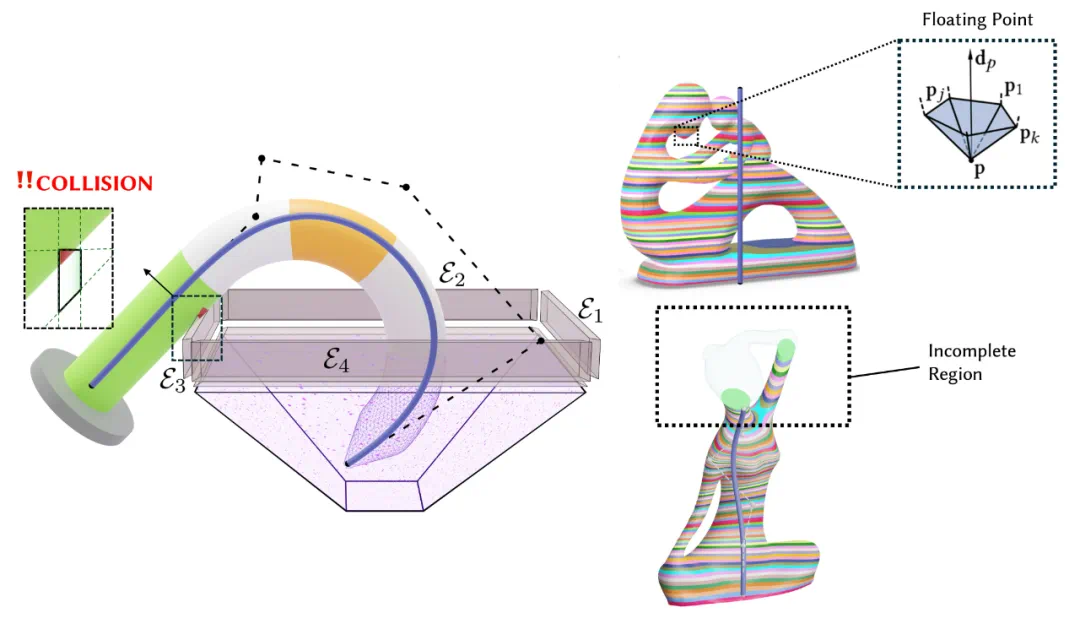
 (Collision-free Loss, 防碰撞约束,上图左侧):这是多轴 DLP 打印中最重要的硬件约束,一旦没有满足,后果不仅仅是打印失败,更是昂贵的硬件事故。团队将环境障碍物建模为一组凸多面体
(Collision-free Loss, 防碰撞约束,上图左侧):这是多轴 DLP 打印中最重要的硬件约束,一旦没有满足,后果不仅仅是打印失败,更是昂贵的硬件事故。团队将环境障碍物建模为一组凸多面体  。算法计算已打印部分与这些多面体的符号距离,一旦出现负距离,即产生巨大的惩罚项。
。算法计算已打印部分与这些多面体的符号距离,一旦出现负距离,即产生巨大的惩罚项。
 (Floating-free Loss, 无悬浮 / 连通性约束,上图右上):这也最棘手的拓扑约束:必须保证新的一层总是 “生长” 在旧的一层之上。如果该约束没有满足,将导致切片凭空出现(即 “悬浮”),固化的树脂不仅无法成型,还会沉入槽底粘死离型膜,导致后续所有打印步骤全部报废 。为了让这种离散状态 “可微”,论文引入了接触状态函数 D (q,t),并利用数学近似处理,使得 “悬浮” 这一物理现象变成了可以求导的数值,从而能被直接放入 Loss 中进行梯度下降。
(Floating-free Loss, 无悬浮 / 连通性约束,上图右上):这也最棘手的拓扑约束:必须保证新的一层总是 “生长” 在旧的一层之上。如果该约束没有满足,将导致切片凭空出现(即 “悬浮”),固化的树脂不仅无法成型,还会沉入槽底粘死离型膜,导致后续所有打印步骤全部报废 。为了让这种离散状态 “可微”,论文引入了接触状态函数 D (q,t),并利用数学近似处理,使得 “悬浮” 这一物理现象变成了可以求导的数值,从而能被直接放入 Loss 中进行梯度下降。
 (Completeness Loss, 完整性约束,上图右下):确保模型的所有部分最终都被打印出来,没有遗漏。
(Completeness Loss, 完整性约束,上图右下):确保模型的所有部分最终都被打印出来,没有遗漏。
通过这种方式,切片问题被彻底重构为一个端到端的数学求解过程:输入一个 3D 网格,算法自动 “搜索” 出一条满足上述方程的最优贝塞尔曲线。
进阶策略:解空间的扩展与拓扑适应
为了应对几何特征极端的模型,单一的连续轨迹往往受限于物理约束而无法求得可行解。为此,研究团队在基础框架之上引入了两个关键策略,显著扩展了算法的求解能力。
1. 初始位姿的联合优化
在常规切片流程中,模型的初始摆放位姿通常是预先固定的。然而,面对复杂的几何结构,固定的位姿往往是致命的—— 它可能直接导致优化问题无解,即无论如何调整切片轨迹,都无法同时满足无悬浮、防碰撞等硬性约束。
该研究将模型的初始位姿参数化为一个变换矩阵  ,并将其直接作为优化变量纳入到整体的数学规划中:
,并将其直接作为优化变量纳入到整体的数学规划中:
这意味着,算法在寻找最优切片轨迹  的同时,也在连续的 SE (3) 空间中搜索最佳的模型摆放角度。
的同时,也在连续的 SE (3) 空间中搜索最佳的模型摆放角度。
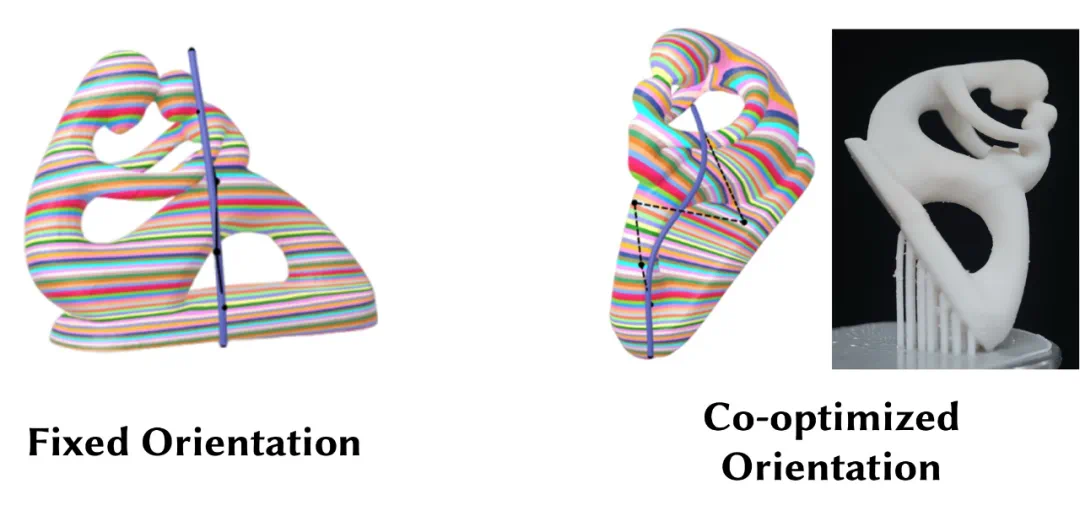
如上图所示,在论文展示的 Fertility 模型中,固定角度下由于存在无法消除的大角度悬垂,优化容易陷入局部极小值(上图左侧)。而引入 Q 联合优化后,算法自动收敛至一个特定的倾斜角度(上图右侧),使得所有悬垂区域的法向与打印方向的夹角均满足无支撑阈值,从而在不添加任何支撑的情况下完成了制造 。
注:在物理制造环节,为了保证首层与平台的粘附强度,我们在触底点增加了少量的辅助结构。
2. 自适应多曲线划分
对于具有更复杂拓扑结构(如多重环面结 Toroidal-Tubes)的模型,单一的贝塞尔曲线无法在满足 “无悬浮” 约束的同时覆盖整个几何体。针对这一问题,论文提出了一种自适应细分策略,将单轨迹优化扩展为多轨迹协同规划。
动态空间划分:算法采用分而治之的逻辑。当单条曲线无法满足约束(例如检测到悬浮点)时,系统会自动利用 de Casteljau 算法将曲线分裂,并引入新的控制点。
关键在于,每一段曲线  不仅定义了局部的打印路径,其起始点的切平面还隐式地定义了对 3D 空间的划分边界。
不仅定义了局部的打印路径,其起始点的切平面还隐式地定义了对 3D 空间的划分边界。
协同优化:分裂后的多条曲线并非独立求解,而是被置于同一个计算图中进行联合优化。随着控制点  的更新,空间划分的边界也在动态调整,直到找到一组能够完美 “拼接” 且满足所有物理约束的轨迹组合。
的更新,空间划分的边界也在动态调整,直到找到一组能够完美 “拼接” 且满足所有物理约束的轨迹组合。
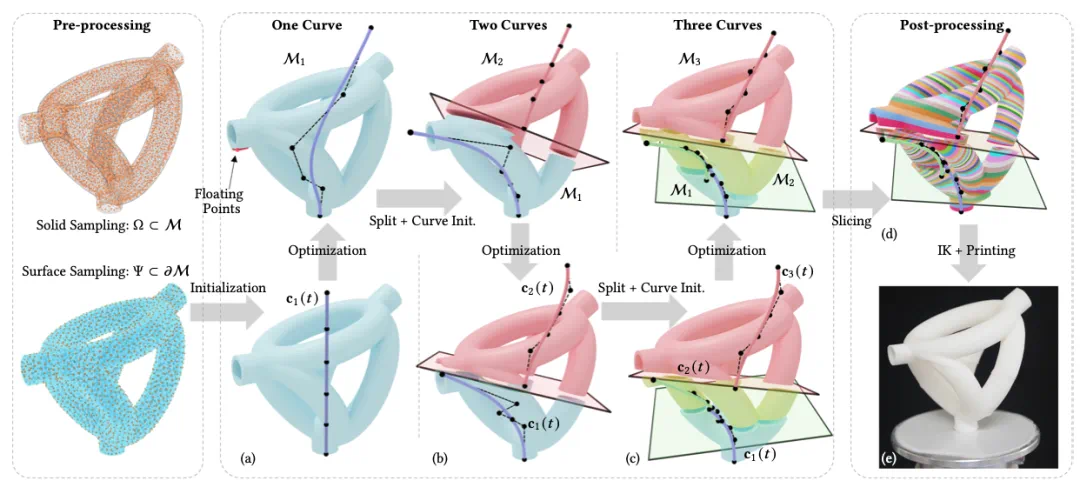
如上图所示的 Toroidal-Tubes 模型,算法从 1 条初始曲线开始,根据 Loss 反馈自动迭代分裂为 3 条曲线,最终成功实现了这一高亏格模型的无支撑打印。
实验验证
1. 计算分析
团队在配备 NVIDIA RTX 4090 的工作站上进行了算法性能测试。实验统计表如下
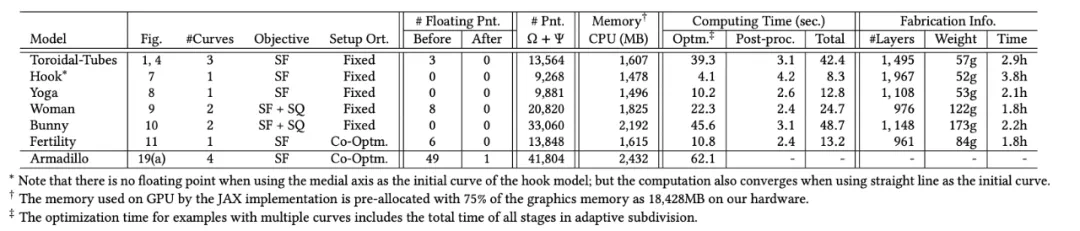
基于 JAX 框架实现的微分优化算法展现了极高的收敛效率。对于大多数测试用例,生成轨迹的耗时控制在 30 秒以内 。
2. 物理制造
团队搭建了由 UR5e 六轴机械臂与 DLP 投影仪组成的物理打印平台进行实物验证。

物理实验重点验证了生成轨迹的可制造性及表面质量。所有展示模型均未添加用于支撑几何悬垂的内部结构,仅保留了底部基座以增强物理附着力。
复杂拓扑成型:图示左一的Toroidal-Tubes拥有 4 个亏格。物理打印证实,算法生成的 3 段协同轨迹能够精确覆盖其复杂的缠绕结构,且未发生机械臂碰撞或树脂断层 。
表面质量提升:在Bunny 和Woman模型中,通过引入表面质量损失函数,切片法向被动态调整以贴合模型表面。实物对比显示,模型平缓区域(如 Bunny 背部,Woman 脸部)的阶梯效应得到显著抑制,表面光洁度明显优于传统固定平面切片 。
让我们欣赏一下打印Toroidal-Tubes时的完整视频
总结与展望
这项研究提出了一种基于可微轨迹优化的多轴 DLP 3D 打印切片框架。与传统基于几何规则的离散切片方法不同,该工作将切片过程建模为一个连续的数学优化问题。
核心贡献总结
1. 统一的优化框架:将防碰撞、连通性、无支撑等离散的制造约束转化为可微的损失函数,实现了在连续解空间中的梯度下降求解。
2. 全流程联合优化:算法不仅优化打印路径,还支持对模型初始位姿和空间划分进行联合优化,显著扩展了多轴系统的求解能力。
3. 自适应拓扑处理:提出的自适应多曲线细分策略,有效解决了高亏格复杂拓扑结构的覆盖难题。
未来展望
该工作的核心价值在于验证了数值优化方法在制造工艺规划中的有效性。
物理约束的引入:目前的优化主要基于几何约束。未来的工作可以进一步引入流体力学或结构力学约束,将树脂流动性及打印过程中的机械稳定性(如底部附着力)纳入优化目标,以实现真正意义上的全自动制造。
工艺推广:这种将 “路径规划” 转化为 “轨迹优化” 的数学思路,具有通用的借鉴意义,有望被迁移至五轴 CNC 加工或机器人焊接等其他减材或等材制造领域。
团队介绍
本项研究成果由香港中文大学博智感知交互研究中心(CPII)、机械及自动化工程系以及曼彻斯特大学数字化制造实验室团队共同完成 。
其中,香港中文大学博智感知交互研究中心(Centre for Perceptual and Interactive Intelligence, CPII)是香港中文大学在InnoHK 创新香港研发平台 下成立的重点研究中心 。
论文的第一作者为研究中心戴澄恺博士(Chengkai Dai),曼彻斯特大学的刘韬(Tao Liu)为共同第一作者 。曼彻斯特大学的 Charlie C.L. Wang 教授担任本文的通讯作者 。
值得一提的是,这是该团队在三年内第二次获得 SIGGRAPH Asia 最佳论文奖,彰显了其在机械臂 3D 打印领域的深厚积累。


