近日,杭州灵巧手企业曦诺未来,完成超亿元天使轮融资,本轮融资由宁德时代旗下唯一的产业投资平台溥泉资本(CATL Capital)领投,小米战投、正轩资本、东方嘉富、电科基金、L2F光源创业者基金跟投,光源资本担任独家财务顾问。该笔融资将主要用于加速公司核心产品的研发迭代、人才团队提升及量产落地。
曦诺未来成立于2024年底,聚焦高自由度灵巧手、微型电缸、高扭矩密度一体化关节模组的研发、生产与销售,拥有从机加工、电机绕线到组装测试的完整产线,是国内少数具备电机、电控、减速器、丝杠、算法完整自研自产能力的灵巧手和执行器供应商。
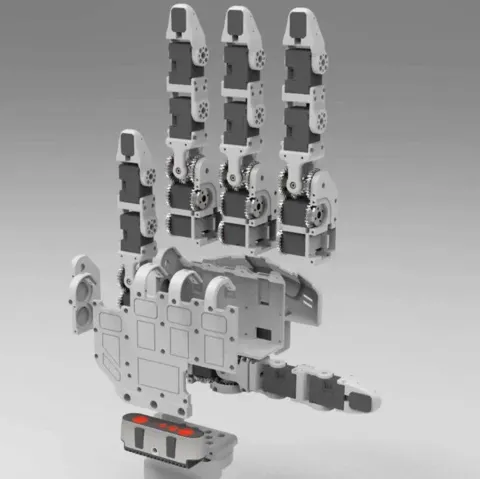
公司核心团队拥有相关领域20余年研发经验。凭借深厚积淀,团队在成立数月内即实现硬件电驱系统与软件控制核心架构和算法的双重突破,成功研发出全球首款全自研、可量产的高自由度腱绳驱动灵巧手Xynova Flex 1。该产品拥有25个自由度,手掌重量仅380克,负载能力高达30公斤以上,单指指尖力超20N,单次手掌完整开合仅0.6秒,是目前市面上自重最轻、负载力最高的高自由度灵巧手,综合性能指标处于行业领先地位。


在硬件层面,凭借独特的设计和量产工艺,公司自研的空心杯电机直径仅8mm,行星滚柱丝杠直径仅7mm,搭载两者的10-12mm微型电缸的最大输出推力高达100-300N,是目前市面上推力最大、尺寸最小的微型电缸,体现出团队行业顶尖的设计、工艺和集成能力。同时,公司通过材料、结构设计等多重创新,其腱绳传动机构在额定负载下的实测使用寿命已超100万次,体现出极高耐用性,率先突破绳驱寿命瓶颈。
在软件控制层面,公司打造“架构—策略—参数寻优”一体贯通的全栈体系。为同时满足灵巧手关节响应速度与控制精度的双重需求,公司创造性构建指令跟踪性能与抗扰性能解耦的控制架构,并提出融合“模型驱动 + 数据驱动”的控制策略,实现兼具高精度、高响应与强工况适应性的闭环控制,突破高自由度柔性关节建模中的强非线性挑战,充分释放腱绳驱动方案的性能优势。同时,公司创新性设计带物理约束的 AI 智能参数寻优算法,实现控制参数自动、持续优化,无需人工调节,即可在全场景、全工况下稳定输出性能最优的控制效果。
除灵巧手和微型电缸外,公司自研的关节模组在产品一致性、性能、成本等多维度上领跑市场,其产品具有行业最高的扭矩密度322Nm/kg,兼顾性能与超高性价比。多个系列可满足人形、类人形与四足机器人的多样需求,包含大中空、高转速、电磁抱闸、轻量化等多种定制化方案选择。
凭借行业首款全自研、可量产的高自由度绳驱灵巧手,公司已与行业头部人形机器人公司建立了深度合作关系。未来,随着曦诺未来的产品不断迭代,将在工厂作业、商用服务、家务劳动等多个领域完善更广泛、更智能的落地应用,真正实现“柔性之力,衡动之美,回应真实世界的多元需求”。

小米战略投资部表示:“灵巧手是机器人灵巧操作末端的重要执行器,小米看好灵巧手在精细操作、通用仿生的应用趋势及长期市场空间。曦诺未来拥有多年电机积累,自研自制核心部件,方案表现优秀。实现全通用具身操作是长期期待,小米愿意与曦诺同行,共探灵巧操作的边界。”
正轩资本表示:“正轩是国内最早参与具身智能领域的投资机构,始终看好高自由度灵巧手作为产业重要环节,有机会成长出百亿以上规模的大企业。曦诺未来的出现让我们眼前一亮,公司的带头人是全球首屈一指的电机和电控专家,核心团队囊括了来自产业和学界的资深人士,能力完整覆盖了灵巧手所需的各个技术领域。更重要的是,公司从创业到现在,仅用一年时间就实现了产品性能参数全行业领先。我们非常期待公司在人形机器人行业大变局之中快速发展,成为全球一流的核心零部件供应商。”光源资本合伙人娄洋表示:“恭喜曦诺未来完成本轮融资!我们长期看好人形机器人产业链的创新突破,灵巧手作为关键执行器,技术壁垒与产业价值显著。此次引入顶尖产业方有助于加速具身智能走向产业化。凭借团队超20年技术积累,公司成立数月便推出全球首款全自研量产高自由度腱绳灵巧手,展现出领先的正向设计与全链自研能力。光源资本始终以‘专业赋能+长期陪伴’为初心,依托对机器人赛道的深度洞察与产业资源整合能力,助力本轮融资高效完成。未来我们将持续陪伴曦诺未来跨越从技术验证到规模商业化的关键阶段,共同推动其在全球灵巧手赛道稳步前行。”