卷积神经网络(Convolutional Neural Network,简称CNN)是一种深度学习模型,专门用于处理和分析视觉数据,在图像识别、目标检测等任务中表现尤为出色。
然而,CNN的架构因其固有的复杂性和快速演进的特性,往往难以掌握。
在本文中,将详细介绍标准CNN架构及CNN家族中的各类模型,并拆解其核心组成部分,包括:
- 卷积层、
- 池化层、
- 全连接层
同时讲解步长(stride)、卷积核(kernel)、池化(pooling)等关键概念。
什么是卷积神经网络(CNN)
卷积神经网络(CNN) 是一种特殊类型的神经网络,其设计灵感来源于人类大脑的视觉皮层。
与传统神经网络将图像视为扁平像素数组的处理方式不同,CNN采用分层结构,通过学习从边缘、曲线等简单模式到复杂物体、纹理的特征,逐步构建对视觉数据的理解。
其核心功能是通过多层带神经元的网络结构,自适应地从输入数据中学习空间特征层次。
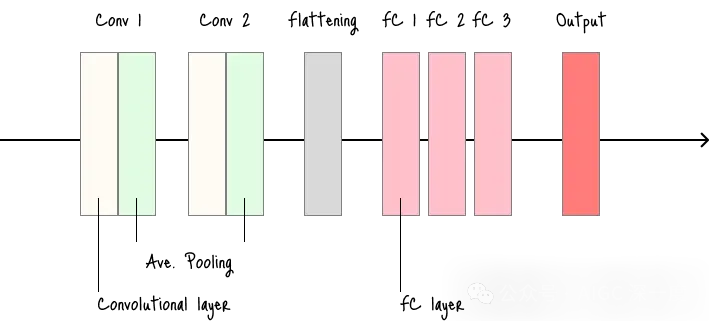
下图展示了标准CNN架构在图像分类任务中的工作流程:
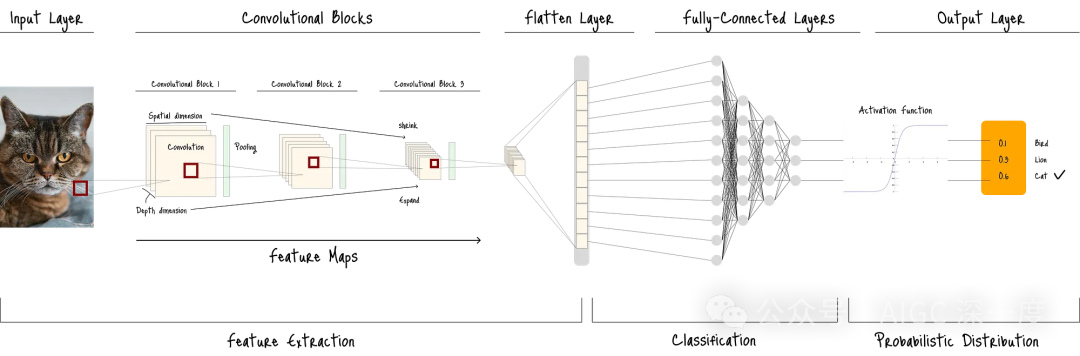 图A: 标准CNN架构
图A: 标准CNN架构
CNN的架构由一系列图层组成,每个图层执行特定操作以提取和转换特征。
在下一部分中,将从“卷积块”开始讲解——卷积块是CNN中用于从输入图像中检测独特特征的核心组件。
卷积块
卷积块(Convolutional Block)是CNN的基础构建单元,由一组用于从输入数据中提取特征的图层组成。
如图A所示,这些卷积块相互堆叠,构成CNN架构的核心部分。
下图详细展示了一个标准卷积块的结构,包含1个卷积层(橙色区域)和1个池化层(绿色区域):
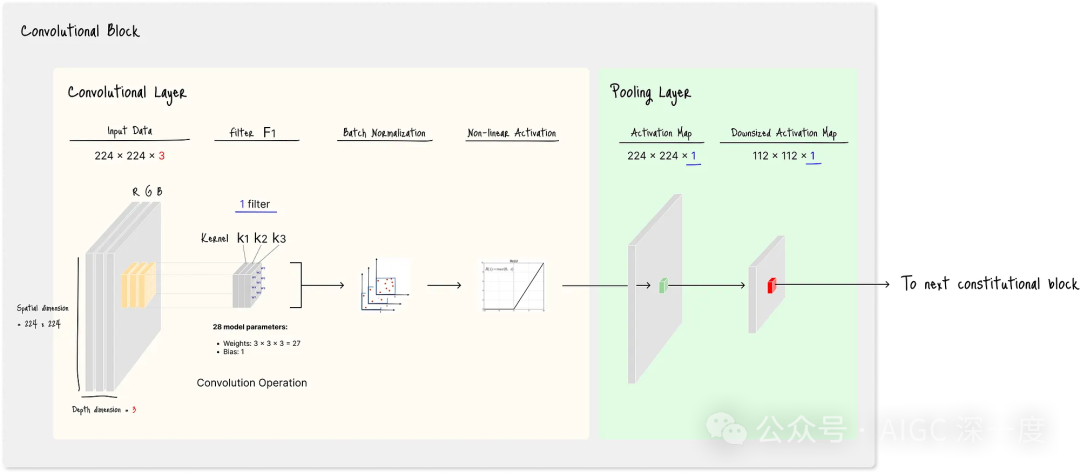 图B_含单个滤波器的标准卷积块架构
图B_含单个滤波器的标准卷积块架构
图B_含单个滤波器的标准卷积块架构
尽管不同CNN架构中卷积块的具体图层可能存在差异,但标准卷积块通常包含:
- 1个或多个卷积层
- 1个池化层
卷积层
卷积层是卷积块的核心,负责检测输入数据中的特定特征。
如图B所示,卷积层的架构包含滤波器(filter) 、批量归一化(batch normalization) 和非线性激活函数(non-linear activation) 三个部分。
其中,滤波器由多个卷积核(kernel,即小型数值矩阵) 组成,通过执行卷积运算(convolutional operation) ,将输入数据中的特定特征突出显示为特征图(feature maps) 。
随后,卷积层对这些特征图应用批量归一化和非线性激活函数,再将处理后的结果传递给池化层。
卷积运算
卷积运算是一个“元素级乘法-求和”过程,帮助网络识别边缘、纹理、形状等特征。
图B中的架构使用了含3个3×3卷积核的单个滤波器——这是因为输入数据具有3个深度维度(深度维度数量与卷积核数量必须保持一致)。
每个3×3卷积核包含9个权重矩阵作为其参数,因此:
- 单个卷积核的参数数量:9个权重
- 单个滤波器的参数数量:3个卷积核 × 9个权重 = 27个权重 + 1个偏置项(bias term)= 共28个可学习模型参数
这些模型参数会在训练过程中不断优化。
滤波器
滤波器由卷积核组成,滤波器的数量直接影响输出特征图的深度。
例如,2个不同的滤波器会生成2个不同的特征图,最终形成深度为2的输出:
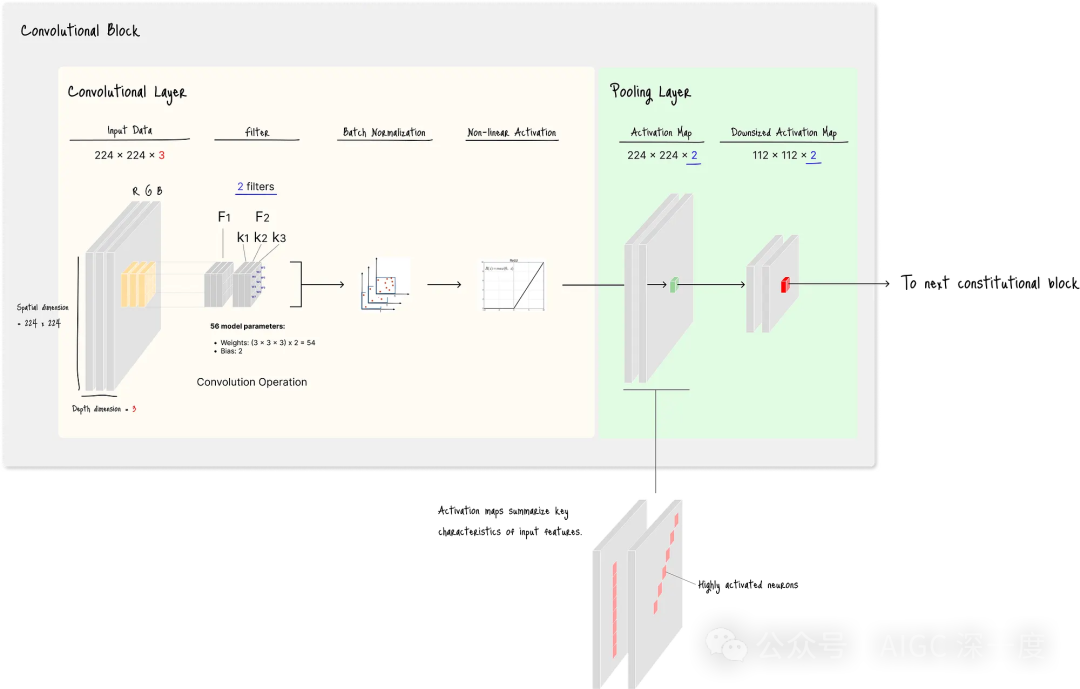 图C. 含两个滤波器的标准卷积块架构
图C. 含两个滤波器的标准卷积块架构
图C. 含两个滤波器的标准卷积块架构
在图C中,由于卷积层使用了2个滤波器,生成了2个特征图,因此池化层最终输出2个激活图(activation maps) 。
每个激活图中都包含高度激活的神经元(图C中的粉色单元格),激活程度取决于该激活图所捕捉的特征类型。
由此可见,使用更多滤波器能让网络从输入数据中捕捉更多样化的特征,这对于识别现实世界物体等变异性较高的任务尤为适用。
但另一方面,增加滤波器数量会显著增加可学习模型参数的数量:
- 图B(1个滤波器) :每个卷积层含28个参数
- 图C(2个滤波器) :每个卷积层含56个参数
参数增加会导致:
- 训练时间延长
- 内存占用增加
- 过拟合(overfitting)风险上升
因此,在CNN架构设计中,找到“滤波器数量”与“模型性能/效率”的平衡是关键。
卷积运算的数学表达式
卷积运算的过程是:卷积核在输入数据上滑动(或“卷积”),将卷积核中的数值与当前覆盖的图像块(image patch)的对应像素值相乘,再将所有乘积结果求和,最终得到特征图中的单个数值。
若将输入数据表示为I,卷积核表示为K(其中M为卷积核的高度维度,N为宽度维度,例如图B中M=N=3),当前像素坐标表示为(i, j),则该过程的数学表达式为:
 图片
图片
其中:
- (I ∗ K):特征图(输入图像I与卷积核K通过互相关运算(cross-correlation) 得到的卷积结果)
- (i, j):当前像素的坐标
- I:输入数据(矩阵),I(i, j)表示第i行、第j列像素的数值
- K:卷积核矩阵(维度为M×N)
- K(m, n):卷积核第m行、第n列的权重值(对应图B中的w₁至w₉)
例如,下图展示了使用索贝尔卷积核(sobel kernel) (一种二维卷积核)执行的卷积运算:
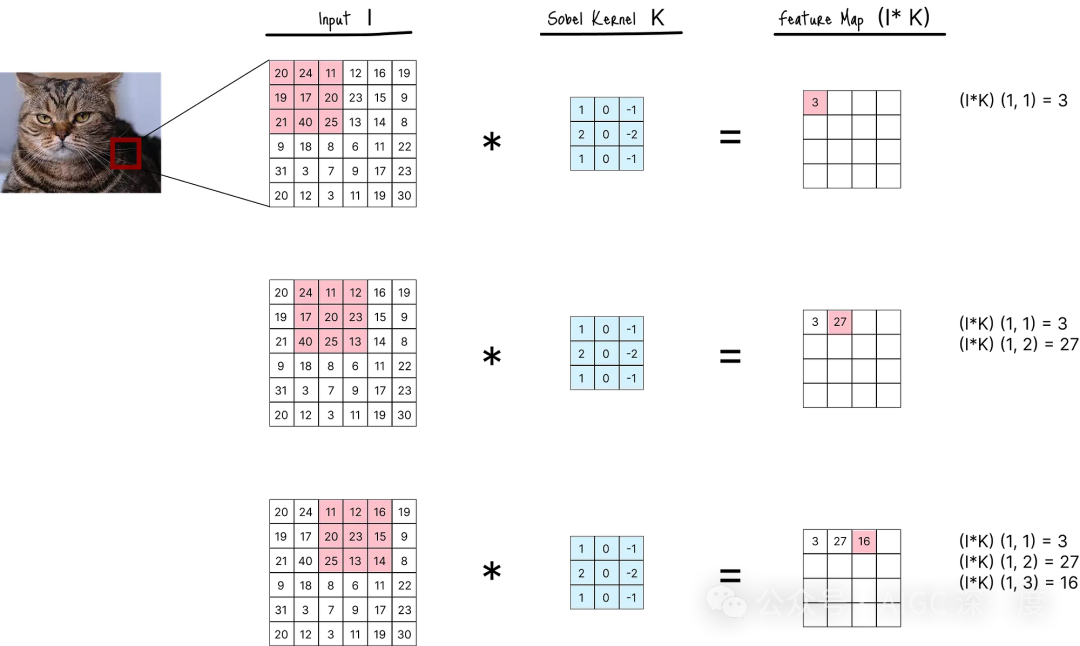 图D 索贝尔卷积核的卷积运算过程
图D 索贝尔卷积核的卷积运算过程
在图D中,卷积运算首先对初始的3组坐标(i, j)= (1, 1)至(i, j) = (1, 3)执行计算。
在实际应用中,该过程会对输入I中所有可能的坐标组重复执行,最终生成完整的特征图。
步长(stride) 和填充(padding) 是决定卷积核需处理多少组坐标的关键参数。
步长与填充
步长(stride) 指卷积核在输入矩阵上滑动时每次移动的像素数。
在图D中,步长设置为1,即卷积核每次计算后向右移动1个像素。
尽管步长为2或更大的情况并不常见,但步长越大,最终输出特征图的尺寸越小。
填充(padding) 是在输入图像边缘添加额外像素的技术,主要用于:
- 保留空间维度:卷积运算会缩小输出特征图的尺寸,通过在输入图像边缘添加像素,可使输出尺寸等于或大于输入尺寸。
- 避免边缘信息丢失:图像边缘的像素仅被卷积核处理少数几次,而中心像素会被多次处理。填充能确保所有像素被平等处理,避免重要边缘信息的丢失。
默认的填充设置是有效填充(valid padding,也称“无填充”) :不在输入图像边缘添加任何像素,卷积核仅在输入图像的有效区域内滑动,最终输出尺寸小于输入尺寸。
与之相对,零填充(zero padding) 是一种常用的填充方式,即在图像边缘添加数值为0的像素。
零填充的常见策略包括:
- Same填充(Same Padding):添加恰好足够的零像素,使输出特征图的尺寸与输入完全相同。填充量会根据卷积核尺寸和步长自动计算。
- Full填充(Full Padding):在图像边缘添加大量零像素,确保输入图像的每个像素(包括角落像素)都能成为卷积核的中心。这种方式会使输出尺寸大于输入尺寸。
在图D中,为简化演示,采用了有效填充(无填充)。
若应用零填充,输入数据将呈现为图D’ 的形式,卷积核会在这些填充区域上滑动以执行卷积运算:
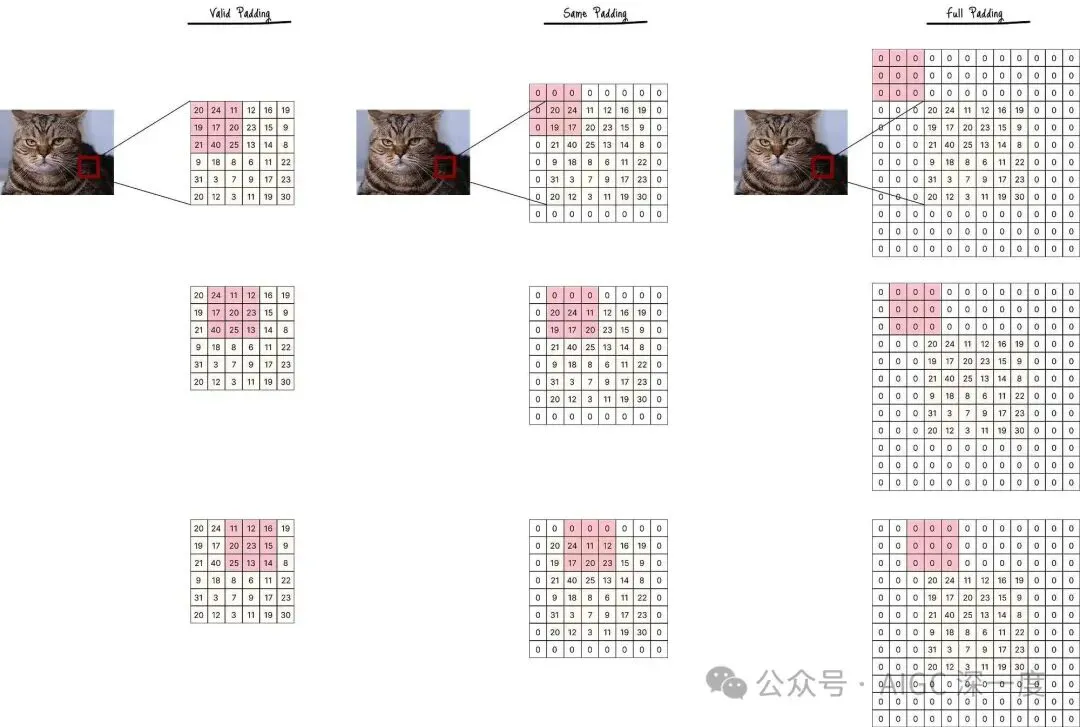 图D :含零填充的输入数据
图D :含零填充的输入数据
最后,二维卷积核生成的输出尺寸O可通过以下公式计算:
 图片
图片
其中:
- O:输出特征图的尺寸(高度或宽度)
- n:输入数据的尺寸(高度或宽度)
- f:卷积核的尺寸
- p:填充量(边缘添加的像素数)
- s:步长
以图D’ 为例,已知参数如下:
- n = 6(输入尺寸)
- f = 3(卷积核尺寸)
- p = 0(有效填充)或p = 1(Same填充)
- s = 1(步长)
则不同填充策略下的输出尺寸计算如下:
- 有效填充(p=0):O = ((6 - 3 + 0) / 1) + 1 = 4 → 小于输入尺寸n=6
- Same填充(p=1):O = ((6 - 3 + 2) / 1) + 1 = 6 → 等于输入尺寸n=6
- Full填充(p=3,此处需调整p以满足Full填充逻辑):O = ((6 - 3 + 6) / 1) + 1 = 9 → 大于输入尺寸n=6
这些计算结果清晰展示了填充对输出尺寸的影响。
批量归一化
部分卷积块会在激活函数之前加入批量归一化(Batch Normalization,简称BN)过程。
该过程对特征图进行归一化处理,通过减少内部协变量偏移(internal covariate shift) ,帮助稳定训练过程。
内部协变量偏移是指:在神经网络训练过程中,各层输入数据的分布会发生变化。这种偏移会迫使每一层在每个训练周期(epoch)都重新适应变化的输入分布,从而减缓训练速度。
批量归一化是解决这一问题的常用方案:通过将特征图的均值调整为0、方差调整为1,使输入分布更密集、更稳定,进而加速训练。
非线性激活函数
在卷积层运算的最后一步,会对每个特征图应用非线性激活函数(non-linear activation function) 。
常用的激活函数是ReLU函数(Rectified Linear Unit),其作用是返回输入值(神经元的加权和与偏置之和,记为x)与0中的较大值,公式如下:
 图片
图片
该过程为网络引入了非线性特性,使其能够学习复杂的特征模式。
池化层
池化层(Pooling Layer) 通过缩小特征图的空间维度,对特征图进行下采样(downsample),最终生成激活图。
池化层的主要作用包括:
- 降低计算负荷:缩小特征图尺寸,减少后续图层的参数数量和计算量。
- 实现平移不变性(translation invariance):使网络对输入特征的位置偏移更具鲁棒性,确保即使特征位置发生微小变化,网络仍能识别该特征。
池化层生成的每个激活图,都是对卷积层处理后输入数据特征的“总结”。
池化运算的类型
下图展示了多种常见的池化运算方式:
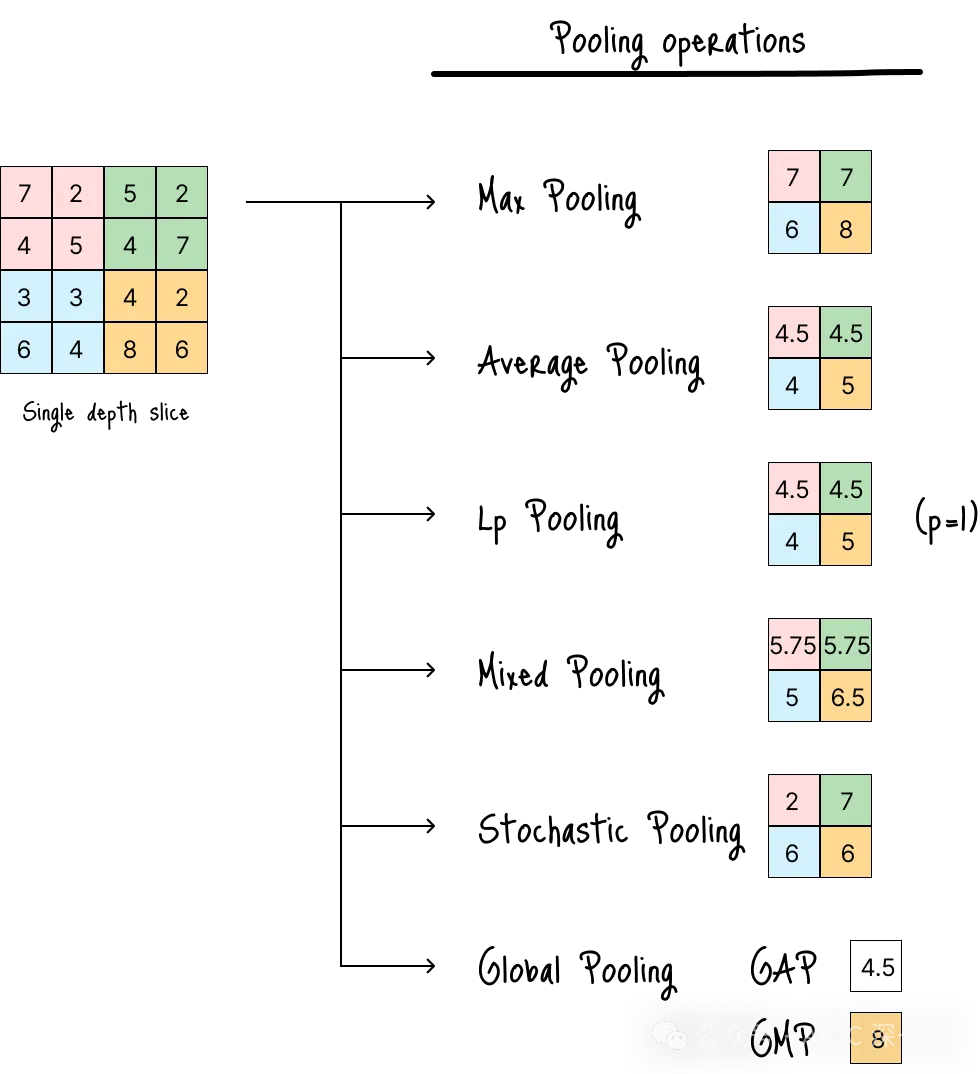 步长时的多种池化运算
步长时的多种池化运算
最大池化(Max Pooling)
最常用的池化方式,从指定区域中选择激活程度最高的特征。
这种方式会提取区域内最显著的特征,同时丢弃其他被认为不重要的特征。
常见应用场景:
- 大多数图像分类任务(目标是识别特征是否存在,而非精确位置)。
平均池化(Average Pooling)
计算池化窗口内所有元素的平均值。
与最大池化不同,平均池化会考虑区域内的所有数值,有助于平滑特征图、减少噪声干扰。
常见应用场景:
- 医学影像分析
- 卫星影像处理
- 任何需要关注区域内特征整体分布(而非单一强信号)的任务。
Lp池化(Lp-Pooling)
一种广义的池化方式,通过计算池化窗口内数值的Lp范数(Lp norm) 实现下采样,最大池化和平均池化均为其特殊情况:
- 当p = 1时,Lp池化等价于平均池化。
- 当p = ∞时,Lp池化等价于最大池化。
常见应用场景:
- 科研领域中的广义池化方案。
混合池化(Mixed Pooling)
对最大池化和平均池化的线性组合。
网络可根据具体任务学习最优的组合比例,灵活性更高。
常见应用场景:
- 科研领域中的广义池化方案。
随机池化(Stochastic Pooling)
与确定性选择(如最大池化选最大值、平均池化算平均值)不同,随机池化会根据数值大小按比例随机采样池化窗口内的激活值。
这种随机性可作为一种正则化手段,帮助减少过拟合。
常见应用场景:
- 处理小型数据集时,用于缓解过拟合的正则化方法。
全局池化(Global Pooling)
与滑动小窗口的池化方式不同,全局池化将整个特征图总结为单个数值。
全局池化通常应用于CNN的卷积部分末尾、全连接层之前,主要有两种类型:
- 全局平均池化(Global Average Pooling,GAP):计算整个特征图所有元素的平均值。
- 全局最大池化(Global Max Pooling,GMP):取整个特征图的最大值。
尽管池化方式多样,但所有池化运算的核心目标一致:通过下采样缩小特征图尺寸,降低计算负荷,同时实现平移不变性。
池化层的替代方案
池化层可完全由“大踏步卷积层(convolutional layers with larger stride)”替代。
例如,步长设为2的卷积层可将特征图的空间维度缩小一半,实现与池化层相同的下采样效果。
这种替代方案具有两个显著优势:
- 下采样过程的最优学习:允许网络学习最优的下采样操作,可能构建更具表达能力的模型,提升性能。
- 全程保留空间信息:大踏步卷积不会丢弃区域内的数值,能保留更多输入数据信息,帮助网络捕捉更丰富的上下文。
尤其当所有池化层都被大踏步卷积层替代时,会形成全卷积网络(Fully Convolutional Network,FCN) ——这类网络能在整个训练和推理过程中保留空间信息。
研究表明,全卷积网络更适合需要复杂上下文理解的任务,例如:
- 语义分割(semantic segmentation)
- 异常检测(anomaly detection)
- 目标检测(object detection)
- 图像超分辨率(image super-resolution)
但正如图B和图C所示,增加卷积层会导致可学习参数数量增加,使模型更复杂、计算成本更高。因此,在选择方案时需权衡利弊。
全连接层(FC Layer)
全连接层(Fully Connected Layer,简称FC层) ,又称密集层(Dense Layer) ,是CNN中最后的特征转换部分——该层中每个神经元都与前一层的所有神经元相连。
全连接层的核心作用是:基于卷积块提取的特征图(即特征),做出最终决策。
卷积块提取的特征包括边缘、角落、纹理等局部特征,而全连接层会将这些高层抽象特征整合,用于执行最终任务,例如:
- 分类任务:在图像分类问题中,全连接层会将扁平化后的特征图转换为每个类别的概率。
- 回归任务:在回归问题中,全连接层会输出单个连续值。
扁平化步骤
如图A所示,在全连接层处理特征图之前,需先将特征图转换为单个长一维向量(1D vector)——这一过程称为扁平化(flattening) 。
该步骤是必要的,因为全连接层仅接受一维向量作为输入。
扁平化后的向量将作为第一层全连接层的输入,随后依次传递给后续全连接层进行处理。
注意事项
全连接层擅长学习特征间的全局模式和关联,因此在最终决策步骤中表现出色。
但全连接层的参数数量极大:由于每个神经元都与前一层所有神经元相连,权重数量会迅速增加。
这会导致两个问题:
- 模型过拟合风险上升
- 计算成本增加
为缓解这些问题,通常会采用 dropout 等正则化技术。
输出层
CNN中的输出层(Output Layer) 是生成网络最终输出的关键层。
输出层会接收卷积块和全连接层传递的高层抽象特征,并将其转换为最终的输出形式。
如图A所示,在分类任务中,输出层会对输入应用softmax激活函数,生成预设类别的概率分布(例如鸟类、狮子、猫)。
Softmax函数能确保所有类别的输出概率之和为1,使结果可直接解释为类别概率。
在回归任务中,输出层通常包含1个或多个神经元,采用线性激活函数(或无激活函数),输出连续值。
以上就是CNN架构的完整介绍。
当卷积层提取完特征层次后,CNN的架构会过渡到与标准前馈网络(feedforward network)类似的结构。
在训练过程中,全连接层和卷积核的权重、偏置等可学习模型参数,会通过反向传播(backpropagation)算法不断优化。
卷积神经网络的类型
为应对不同任务挑战,研究者开发了多种CNN架构。
首先,根据卷积核的维度,CNN可分为三类:
- 一维CNN(1D CNNs)
- 二维CNN(2D CNNs,最常见的CNN类型,如图C中使用的索贝尔卷积核)
- 三维CNN(3D CNNs)
下面将分别介绍这三类CNN。
一维CNN(1D CNNs)
一维CNN适用于序列数据(如时间序列分析、自然语言处理),其滤波器仅沿序列的一个维度滑动。
常见应用场景:
- 文本、音频、传感器数据等序列数据的分析与特征提取。
缺点:
- 不适用于需要从图像或视频中提取空间特征的任务——因为一维CNN仅考虑输入数据的一个维度。
二维CNN(2D CNNs)
二维CNN是处理图像和视频数据的标准类型。
如前所述,其滤波器在二维平面上滑动,捕捉空间特征,因此能高效学习空间特征层次。
常见应用场景:
- 图像分类、目标检测等涉及静态视觉数据的任务。
缺点:
- 不适用于体积数据(volumetric data)或具有强时间相关性的序列数据。
主要的二维CNN模型
以下是几种典型的二维CNN架构模型:
LeNet-5
- 手写数字识别领域的开创性模型。
- 适用场景:作为简单图像分类任务(低分辨率图像)的基础模型。
- 缺点:深度和容量有限,不适用于复杂、高分辨率图像任务。
 LeNet架构
LeNet架构
AlexNet
- 比LeNet-5更深、更宽,是推动深度学习普及的关键模型。
- 适用场景:作为比LeNet更强的图像分类基准模型,适用于较大数据集。
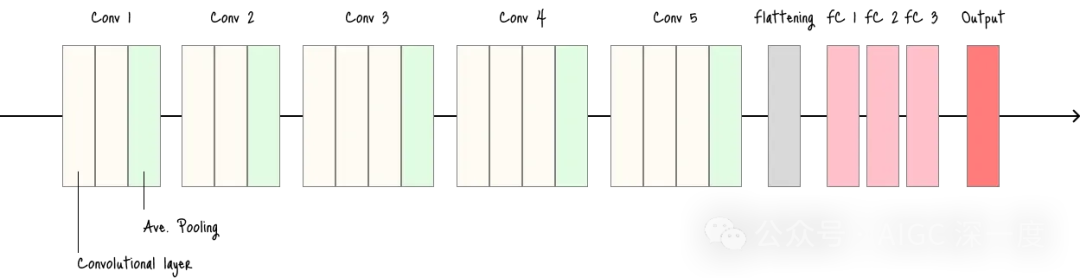
- 缺点:以当前标准来看架构较浅;使用的大尺寸卷积核(11×11、5×5)效率较低。
 AlexNet架构
AlexNet架构
VGGNet
- 架构简洁统一,通过使用小尺寸(3×3)卷积核增加网络深度。
- 适用场景:作为其他模型的特征提取器(架构鲁棒且易于理解)。
- 缺点:参数数量大、内存消耗高,导致训练和部署速度慢。
 VGGNet架构
VGGNet架构
GoogLeNet
- 深度网络,参数数量较少——核心创新是“ inception模块(inception module)”:该模块允许网络在单个图层内自主选择卷积核尺寸和池化操作。
- 适用场景:需要高性能且计算高效的模型的任务。
- 缺点:架构复杂,理解和实现难度较高。
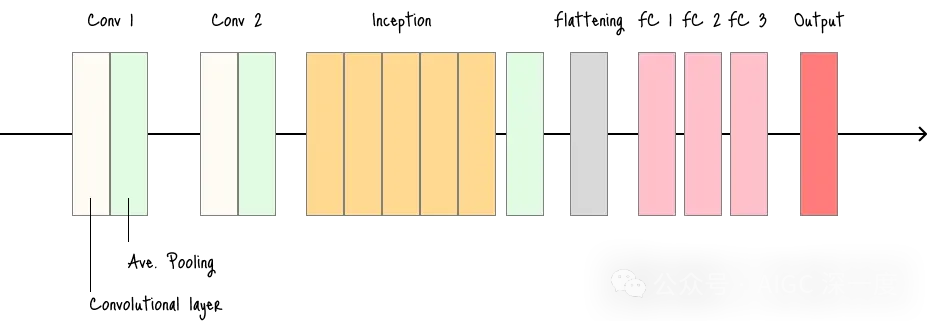 GoogLeNet架构
GoogLeNet架构
ResNet(残差网络,Residual Network)
- 突破性模型,解决了极深网络中的梯度消失(vanishing gradient)问题。
- 适用场景:任何需要训练极深网络的视觉任务——其残差连接(residual connections)可防止网络深度增加时性能下降。
- 缺点:网络深度仍可能导致训练时间较长(尽管比同等深度的非残差网络更易训练)。
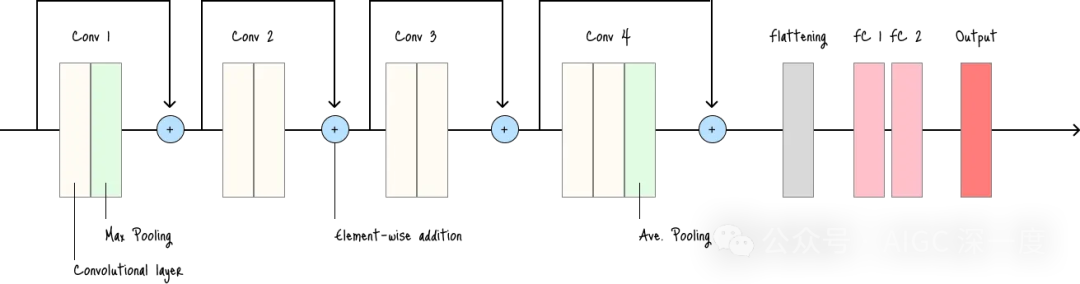 ResNet架构
ResNet架构
DenseNet(密集连接网络,Densely Connected Network)
- 核心特点是“密集连接”:每个图层都与前向传播路径中的所有其他图层相连。
- 适用场景:内存和计算资源有限的任务。
- 缺点:密集连接会导致特征图数量庞大,内存消耗较高。
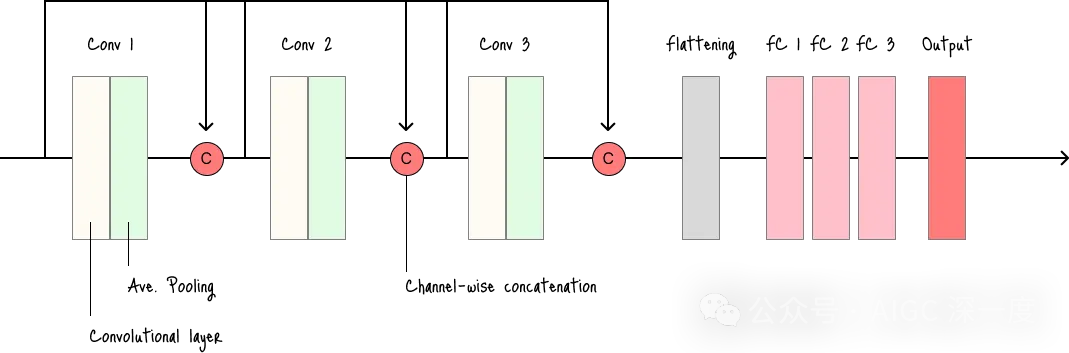 DenseNet架构
DenseNet架构
三维CNN(3D CNNs)
三维CNN适用于体积数据,如医学影像(MRI、CT扫描)或视频分类。
其滤波器在三维空间中运算,可同时捕捉空间和时间信息。
常见应用场景:
- 需同时考虑空间和时间特征进行分类的三维数据任务。
缺点:
- 计算成本高。
- 由于参数数量大,需要大量训练数据。
主要模型:
- DenseNet:尽管DenseNet的常见实现是针对二维卷积,但“密集块(dense blocks)”的核心原理可扩展到三维卷积,适用于医学影像、视频分析等领域。


