在 2025 年最后一天,一个名为 David Moss 的小哥完成了一项壮举:
在 2025 年最后一天,一个名为 David Moss 的小哥完成了一项壮举:
成功实现世界上首次美国西海岸到东海岸的全自动驾驶之旅,同时也成为世界上第一个连续驾驶特斯拉 FSD 行驶 10000 英里的人。
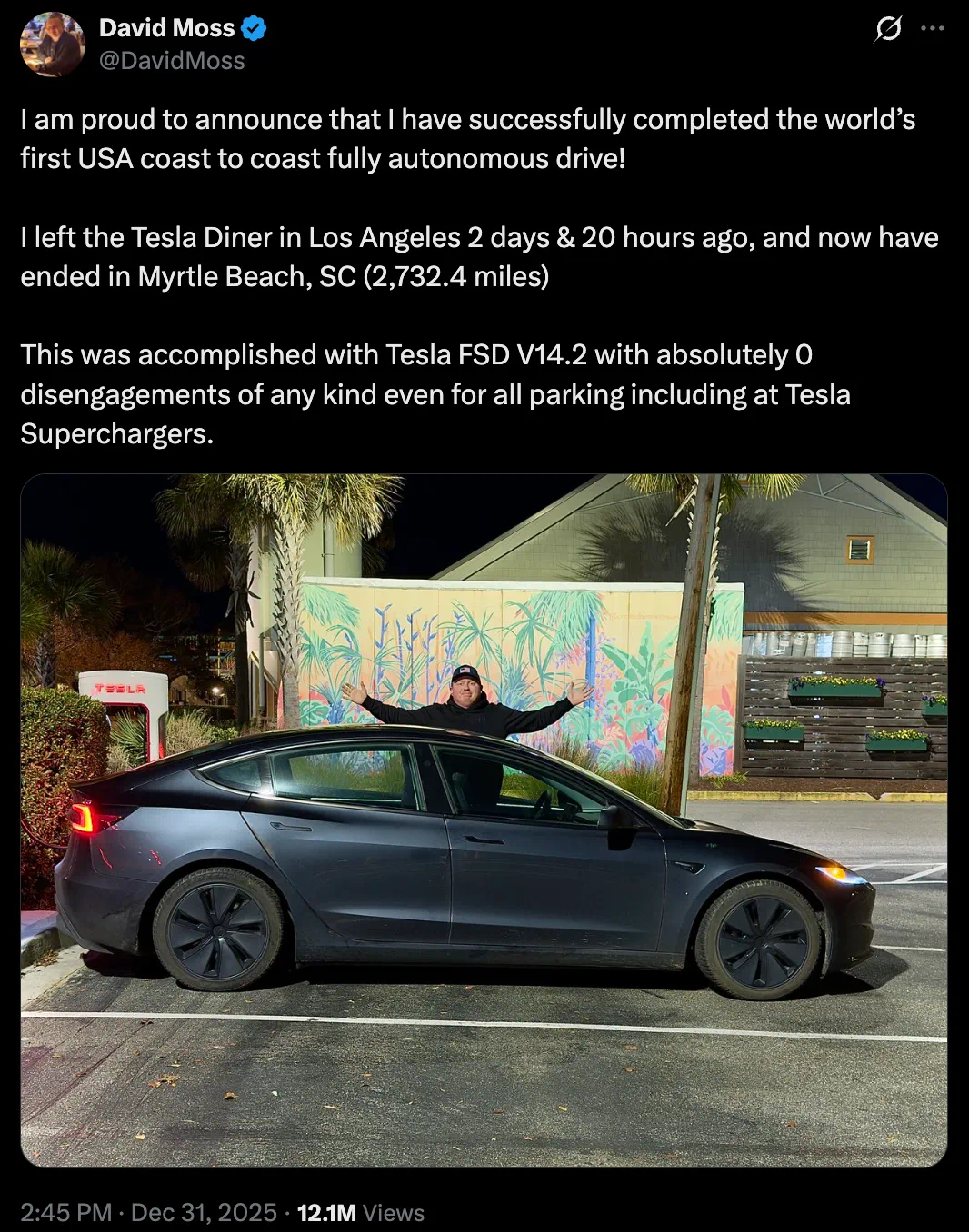
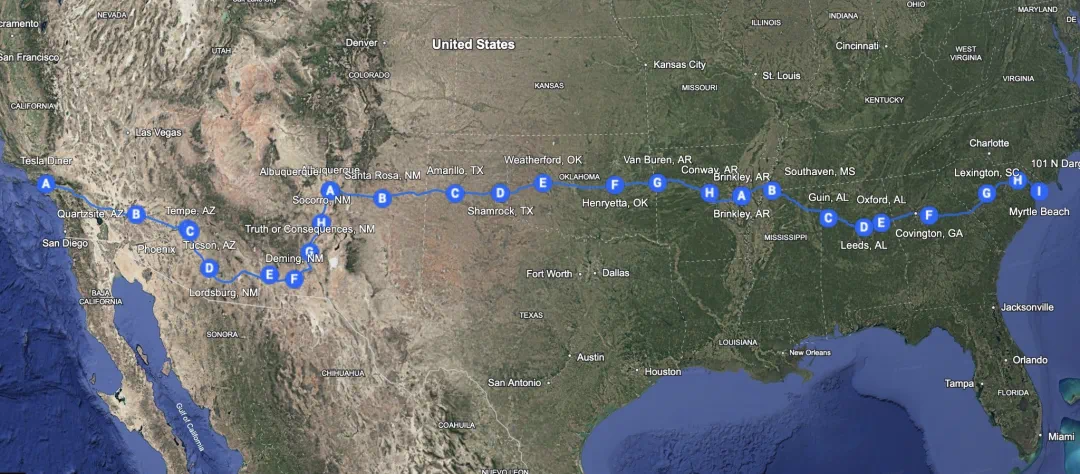
他开着一辆搭载 FSD V14.2 的 2025 款 Model 3,从洛杉矶的 Tesla Diner 出发,历时 2 天 20 小时,走了 2732.4 英里(约 4400 公里),最终抵达南卡罗来纳州的 Myrtle Beach。

一起完成壮举的搭档
整个过程零干预,甚至包括所有停车和在 Tesla 超级充电站充电的环节都没有人为接管。
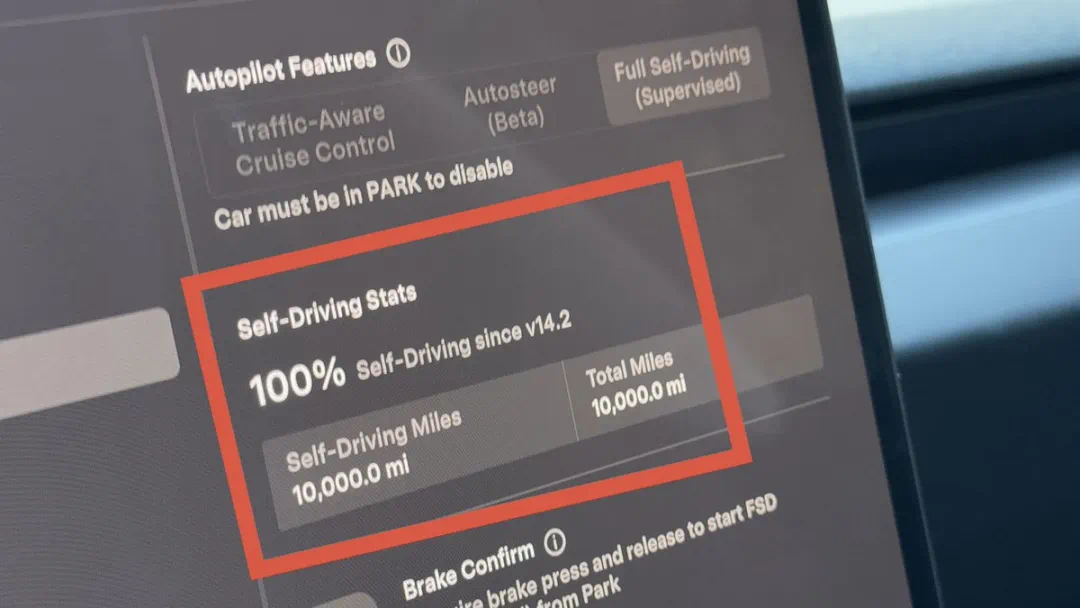
他特别强调这是完全靠 FSD 完成的,并且数据可以通过 Whole Mars 的 FSD 数据库公开验证。
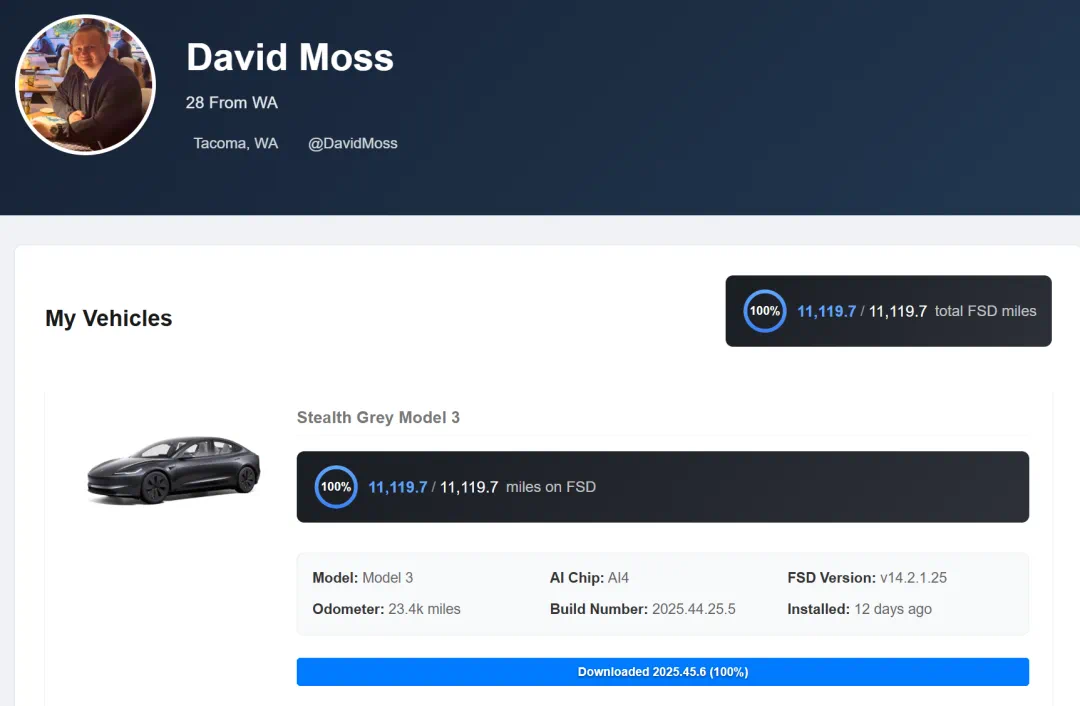
你可在这里追踪他的 FSD 里程 https://fsddb.com/profile/DavidMoss,数据显示,他使用 FSD 在 Model 3 上行驶了 1 万多英里,从未亲自驾驶过车辆。
Moss 在一张地图上详细标注了横跨美国的路线图:
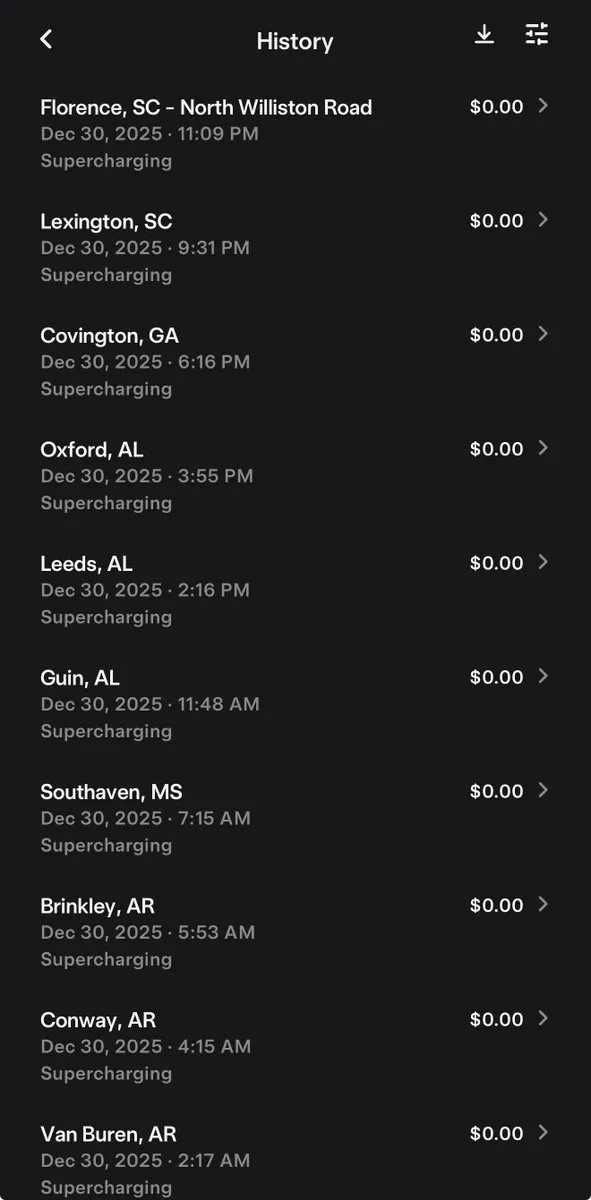
并列出了大约 30 个超级充电站的几乎完整的停留信息:
有网友在评论区询问:过程中是否出现过险情,Moss 表示完全没有。即使对于人类驾驶员来说,这也是不容易实现的。

马斯克看后直接转发并回复「Cool。」

特斯拉 AI 主管 Ashok Elluswamy 称赞道:「这是世界上首次全自动海岸到海岸驾驶,感谢 David Moss!」
马斯克预言终兑现
Andrej Karpathy (特斯拉自动驾驶团队前领导、OpenAI 创始成员)也在第一时间发来贺电。他说,横跨美国的 coast-to-coast 自动驾驶,一直是 Autopilot 团队从立项之初就设定的目标。
事实上,马斯克最初预计,这一里程碑可以在 2017 年底实现。
「为了完成它,团队投入了大量时间。无数个深夜,大家围坐在一起进行马拉松式的片段复盘,一条条查看自动接管的录像:先分流、再归类、再拆解问题,逐项规划项目,把每一个缺口补上,目标只有一个 —— 把干预次数降到零。」
FSD v14.2(Full Self-Driving v14.2)是特斯拉在 2025 年底推出的一次关键自动驾驶软件更新,属于其 FSD 路线的最新进化版本,也允许用户跟踪他们在自动驾驶模式下行驶了多少英里。
相较此前的 v14.1.x,这一版本在驾驶表现、感知能力和决策逻辑上都有明显强化。
从特斯拉官方和社区的普遍反馈来看,FSD v14.2 明显朝着「更像人开车」演进。它在感知和决策上更稳定,对复杂路口、无保护左转、车道博弈的处理更果断,整体驾驶节奏更连贯。
虽然从定义上看,它依然是需要驾驶员监督的 L2 级系统,但在真实道路中的完成度已经显著提升。
小鹏汽车 CEO 何小鹏曾这样评价特斯拉 FSD v14.2:「我最近在美国花了四个小时试驾了特斯拉的 FSD V14.2。一句话总结:如果 FSD 在 2024 年仅仅是『不错的 L2 级驾驶辅助』,那么这个最新版本让我相信 L4 级自动驾驶指日可待。」
特斯拉 vs Waymo:两条路线的较量
消息刷屏后,有 X 友 Yuchen Jin 向 Andrej Karpathy 抛出了一个尖锐的问题:你现在还认为 Waymo 的软件更好吗,还是特斯拉已经领先了?
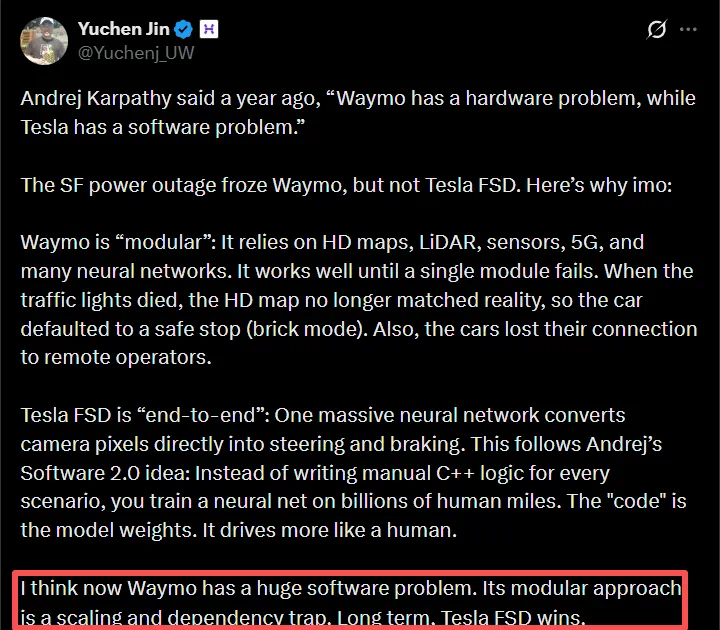
要知道,Karpathy 过去的判断是 ——Waymo 有硬件问题,特斯拉有软件问题。
他回复说,如今两者都堪称「完美驾驶」,虽存在差异,但要么需要时间才能显现,要么只能在大规模车辆数据中被统计出来。
不久前发生在旧金山的一次停电,或许提供了一个现实注脚。停电导致 Waymo 的服务大面积中断,而特斯拉 FSD 基本未受影响。
网友分析指出,原因在于两条技术路线的根本差异。
Waymo 采用高度模块化的系统,依赖高清地图、激光雷达、多传感器融合、5G 网络以及多套神经网络协同工作。在一切条件正常时,它表现非常出色。但只要其中一个关键模块失效,系统就会迅速退化。
当交通信号灯断电后,现实世界已经发生变化,而 HD 地图无法即时反映,车辆无法确认状态,只能回退到最保守的策略 —— 直接停车(brick 模式),车辆还失去了与远程人工接管员的连接,进一步放大了系统的脆弱性。
而特斯拉 FSD 走的是端到端:一个巨大的神经网络,直接把摄像头的像素输入,转换为转向和制动控制。这正是 Andrej 所提出的 Software 2.0 思想 —— 不再为每一种场景手写 C++ 逻辑,而是用数十亿英里的人类驾驶数据去训练模型,代码本身就是模型权重。因此,它的驾驶方式更像人类。
一些观察者认为,如今真正面临软件瓶颈的,反而是 Waymo。模块化架构在规模化与依赖关系上,可能是一种长期的陷阱。长期来看,赢家会是特斯拉 FSD。
迈向真正的自动驾驶
122 年前,汽车先驱 Horatio Jackson 和 Sewall Crocker (以及他们在途中收养的斗牛犬)曾从旧金山驾车前往纽约,用整整 63 天 横穿美国,只为证明汽车并非昙花一现的新奇玩意。
他们因此成为历史上第一批驾车横跨美国的人类 —— 以及那只狗。

今天的这场壮举,或许只是自动驾驶迈出的一小步,但对「自动驾驶即机器人」而言,却可能是一记关键跳跃。
马斯克正在持续加码无人驾驶。6 月,特斯拉已在德克萨斯州奥斯汀推出一项有限规模的机器人出租车服务,使用的是搭载 FSD 的改装版 Model Y。更值得注意的是,马斯克近期透露,这批车辆已进入前排不再配备安全监控员的测试阶段。
从「有人盯着的自动驾驶」,到「系统自己负责」,这一变化幅度貌似不大,却触及了自动驾驶从辅助工具走向真正自主体的临界点。
参考链接:
https://x.com/DavidMoss/status/2006255297212358686
https://x.com/karpathy/status/2006436622909452501?s=20
https://x.com/Yuchenj_UW/status/2003173409665212629?s=20
https://x.com/SawyerMerritt/status/2006042728983908626?s=20
https://x.com/SawyerMerritt/status/2006042725385195766?s=20
https://x.com/elonmusk/status/2006290674761736346?s=20