RGB
基于Transformer的高效单阶段短时RGB-T单目标跟踪方法
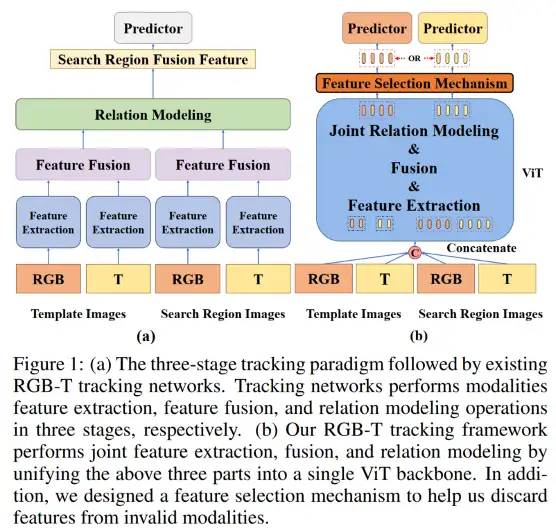
引言如图 1所示,现有的三阶段 RGB-T 单目标跟踪网络通常采用两个独立的特征提取分支,分别负责提取两个模态的特征。然而,相互独立的特征提取分支会导致两个模态在特征提取阶段缺乏有效的信息交互。因此,一旦网络完成离线训练,其仅能从每个模态图像中提取固定的特征,无法根据实际的模态状态动态调整,以提取更具针对性的动态特征。这一局限性制约了网络对多样的目标双模态外观,以及模态外观间动态对应关系的适应能力。如图 2所示,这种特征提取方式并不适合 RGB-T 单目标跟踪的实际应用场景,特别是在复杂环境下,因为被跟踪目标的任意
Lidar 3D传感器点云数据与2D图像数据的融合标注
2D&3D融合以自动驾驶场景为例,自动驾驶汽车需要使用传感器来识别车辆周围的物理环境,用来捕获2D视觉数据,同时在车辆顶部安装雷达,用以捕捉精确目标定位的3D位置数据。激光雷达生成的点云数据可用于测量物体的形状和轮廓,估算周围物体的位置和速度,但点云数据缺少了RGB图像数据中对物体纹理和颜色等信息的提取,无法精确地将对象分类为汽车、行人、障碍物、信号灯等。所以需要将包括丰富的语义信息2D视觉图像和可以提供精确的目标定位3D点云数据进行融合,使自动驾驶系统能够精确地了解周围环境,准确做出判断,让自动驾驶功能得以广泛应
资讯热榜
标签云
AI
人工智能
OpenAI
AIGC
模型
ChatGPT
谷歌
DeepSeek
AI新词
AI绘画
大模型
机器人
数据
Midjourney
开源
Meta
微软
智能
用户
GPT
学习
英伟达
Gemini
智能体
技术
马斯克
Anthropic
图像
AI创作
训练
LLM
论文
AI for Science
代码
腾讯
苹果
算法
Agent
Claude
芯片
具身智能
Stable Diffusion
xAI
蛋白质
人形机器人
开发者
生成式
神经网络
机器学习
AI视频
3D
字节跳动
大语言模型
RAG
Sora
百度
研究
GPU
生成
华为
工具
AGI
计算
生成式AI
AI设计
大型语言模型
搜索
亚马逊
AI模型
视频生成
特斯拉
DeepMind
场景
Copilot
深度学习
Transformer
架构
MCP
编程
视觉