闻乐 发自 凹非寺
量子位 | 公众号 QbitAI
地球的ChatGPT时刻来了!
谷歌DeepMind推出AlphaEarth Foundations模型(下面简称AEF),实现高精度绘制地球。
诺奖得主、谷歌DeepMind首席执行官Demis Hassabis表示:它将为科学家提供近乎实时的地球观测。
该模型主要是解决了数据过载和信息不一致两大难题。简单来说就是观测数据多但高质量标注数据少,给绘制全球地图带来困难。
AEF就像一个虚拟卫星,整合了光学卫星图像、气候模拟等PB级的海量地球观测数据,能够利用多源、离散的数据生成通用的地理空间表示,让科学家能够按需创建地球地图,毫不费力实现全球测绘和监测。
由它生成的卫星嵌入数据集现已被联合国粮农组织、哈佛森林等超50个全球组织使用。
实际上,不只是科学家,普通人也能通过AlphaEarth Foundations轻松读懂地球的变化。
从大航海时代到现代,人类花了500年时间绘制地球,而现在AEF的出现让每天重新绘制地球成为现实。
这让前谷歌地图方面的研究员Bilawal Sidhu惊呼:谷歌朝着构建地球版ChatGPT迈出了重要一步。
来看看它是怎么做到的。
多源信息融合,对时间连续建模
现在有卫星、雷达、无人机、气象站等无数设备,每天都在收集地球的图像、温度、湿度、地形等数据。
但不同国家、机构对于观测数据的标注标准可能不一样,并且地球表面随时在变化(比如森林被砍伐),但实地标注往往几年才更新一次,导致标注数据和实际情况脱节。
简单来说,地球观测数据就像“拍了无数张地球的照片”,但知道“照片里具体是什么”的标注却很少,这直接卡住了全球地图的绘制精度和效率。
而AEF的价值,就在于它能在标注稀少的情况下,依然用好海量观测数据,画出更准确的地图。
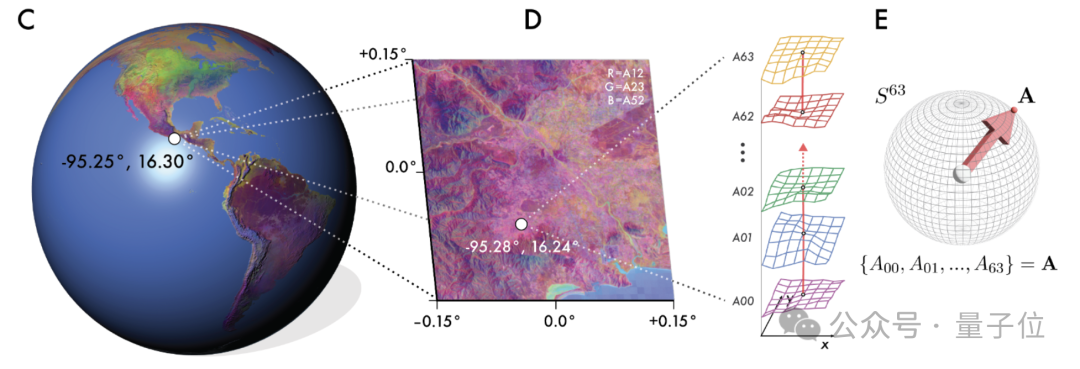
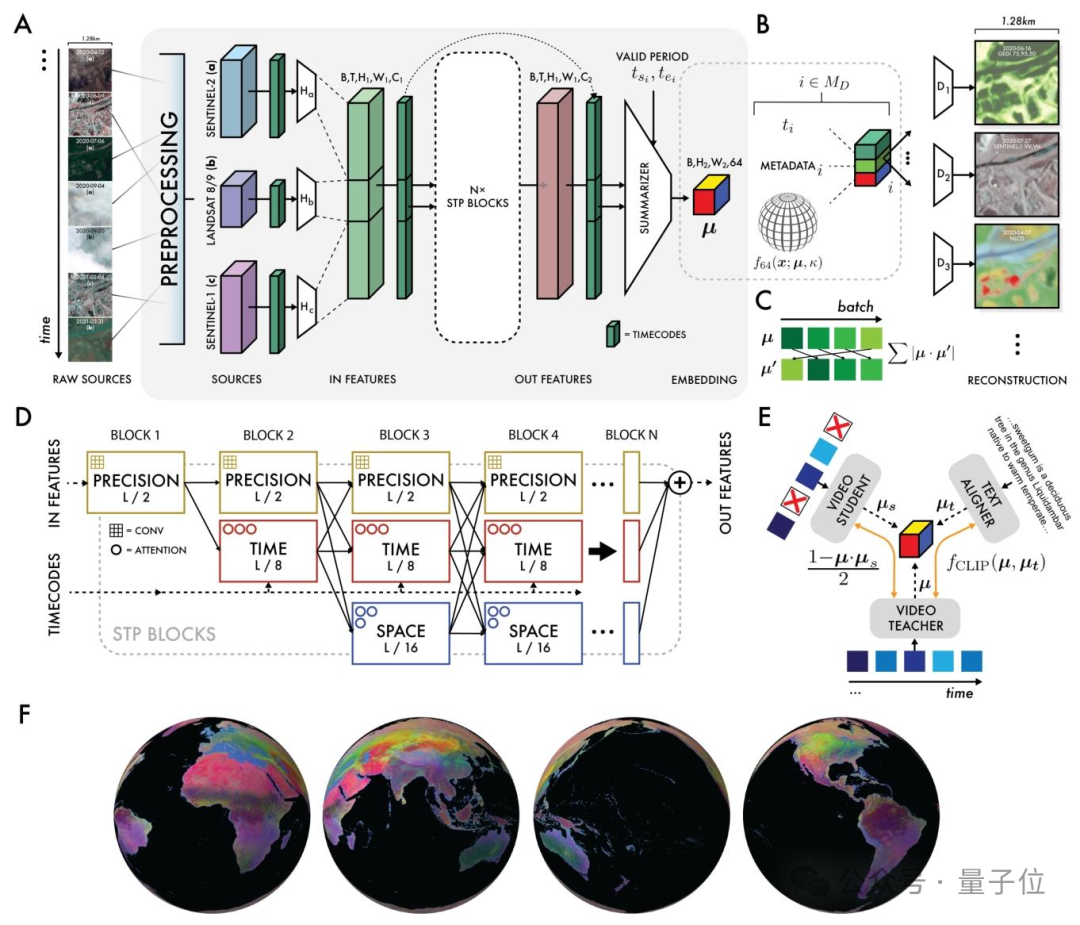
AEF是一种嵌入场模型,核心是时空精度编码器(STP),STP通过空间自注意力捕捉地理上的远距离关联,通过时间轴自注意力解析时序动态,再结合卷积操作保留局部精细特征。
通俗一点说就是把地球表面的复杂信息(如地形、植被、气候等)压缩成一组“数字密码”(嵌入向量),这些密码能精准反映地球表面的时空特征,既能看全局又能抓细节。
AEF的另一大创新是对时间的连续建模能力。
它将观测数据的支持期(数据实际采集的时间范围)与地图生成的有效期(需要映射的时间范围)分离,即使在有效期内没有直接观测数据,也能通过插值或外推生成连续的结果。
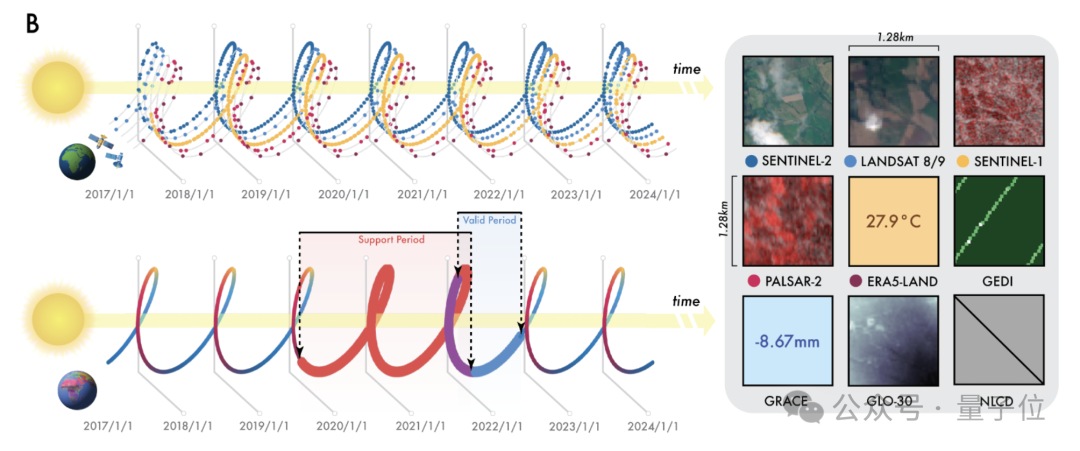
比如,如果只有2018年和2020年的卫星图像,模型能可靠推测出2019年某地区的地表状态,这解决了传统模型只能处理固定时间点数据的局限。

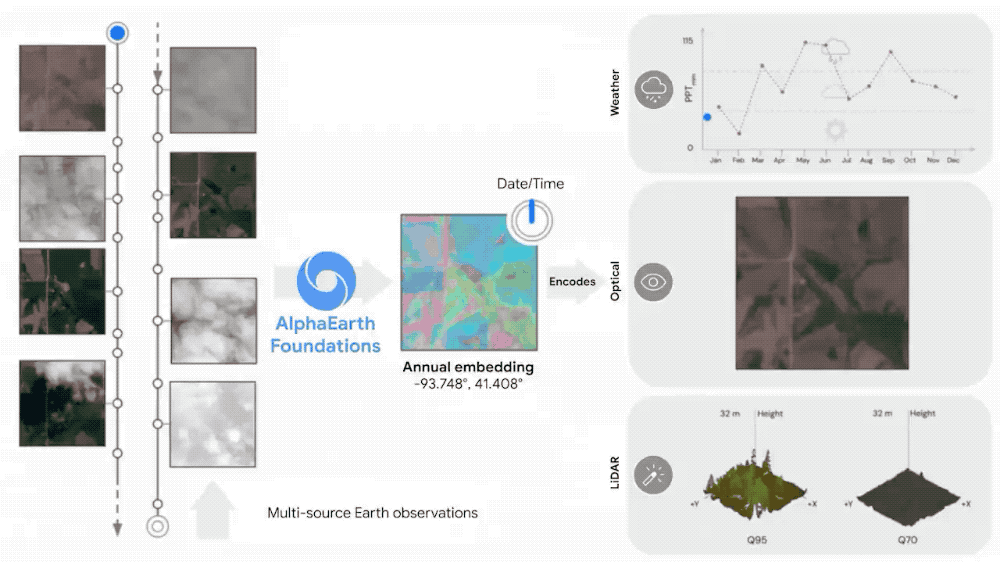
在数据处理上,AEF实现了多源信息的深度融合。
它能接收光学卫星、雷达、激光雷达、气候数据甚至地理文本等10多种输入,打破了数据类型的壁垒。通过统一的编码方式将这些不同类型、不同分辨率的数据转化为可兼容的特征。
例如,光学图像的植被颜色、雷达的地表结构信息、气象站的温度数据,都会被整合到同一个嵌入向量中,这个向量仅64字节。
模型的训练机制也颇具特色。它采用师生模型和对比学习策略。同时,引入文本对齐训练,将地理文本描述与对应区域的嵌入向量关联,进一步丰富特征的语义信息。
最终,AEF生成的嵌入场以10×10米方格形式精确分析地球陆地和沿海水域,同时为每个方格创建高度紧凑摘要,存储空间需求仅为其他AI系统的十六分之一,降低了分析成本。
并且这些嵌入向量无需重新训练就可直接用于各类映射任务,无论是土地覆盖分类、农作物识别还是森林变化检测,都能通过简单的迁移学习实现高精度结果。
卓越性能
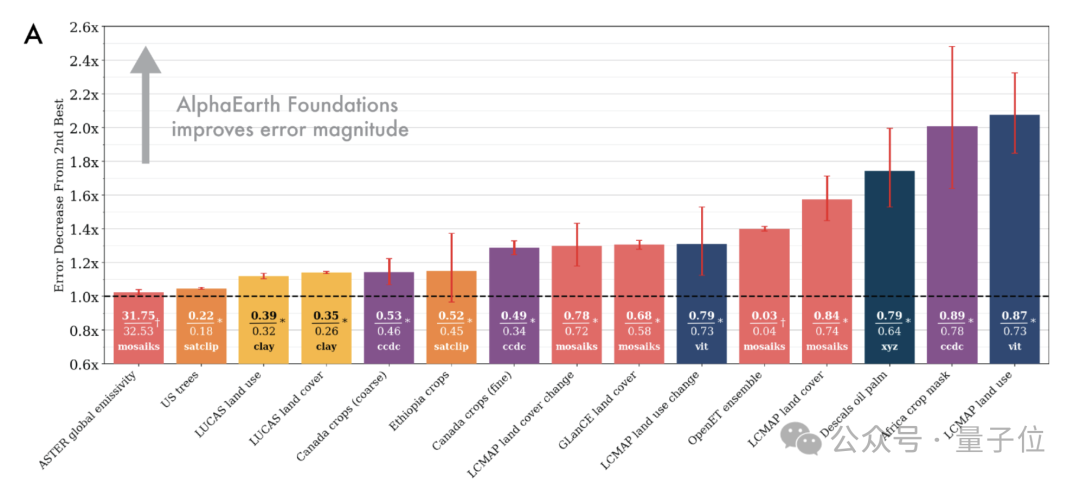
与传统方法和其他AI测绘系统相比,AEF在不同时间段执行多种任务时,包括识别土地利用和估算地表属性等,始终保持最高准确性。
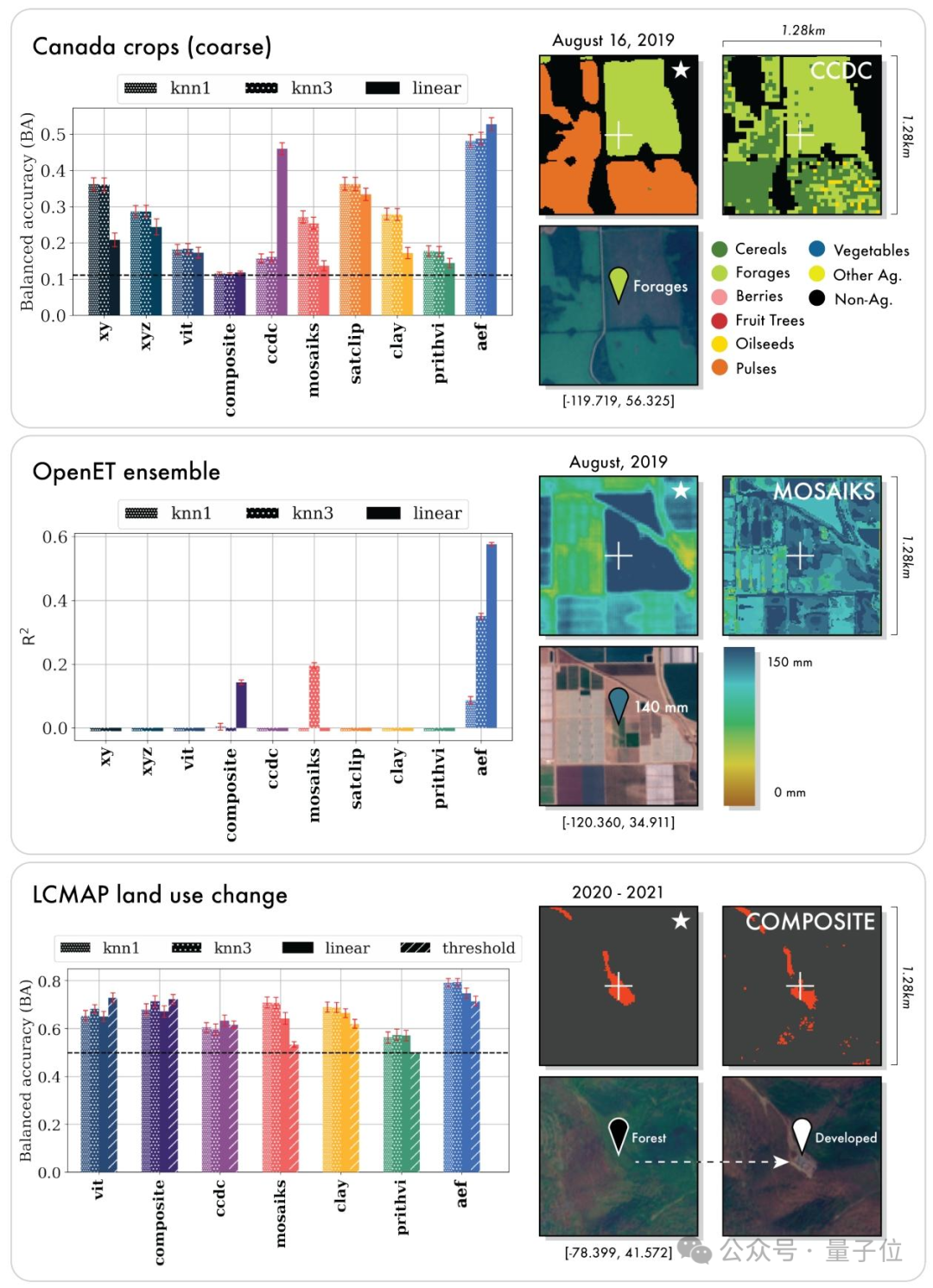
例如在某土地覆盖分类任务中,AEF的平衡准确率达0.82,而次优模型仅0.69。
AEF尤其在标签数据稀缺场景下表现出色,平均错误率比测试模型低24%,展现出卓越的学习效率。
从具体应用场景来看,AEF在主题映射(如土地覆盖分类)、生物物理变量估计和变化检测中表现全面。
例如,在年度土地覆盖变化识别中,它能精准区分森林、农田、城市等类型,对细微变化的捕捉误差远低于传统方法。
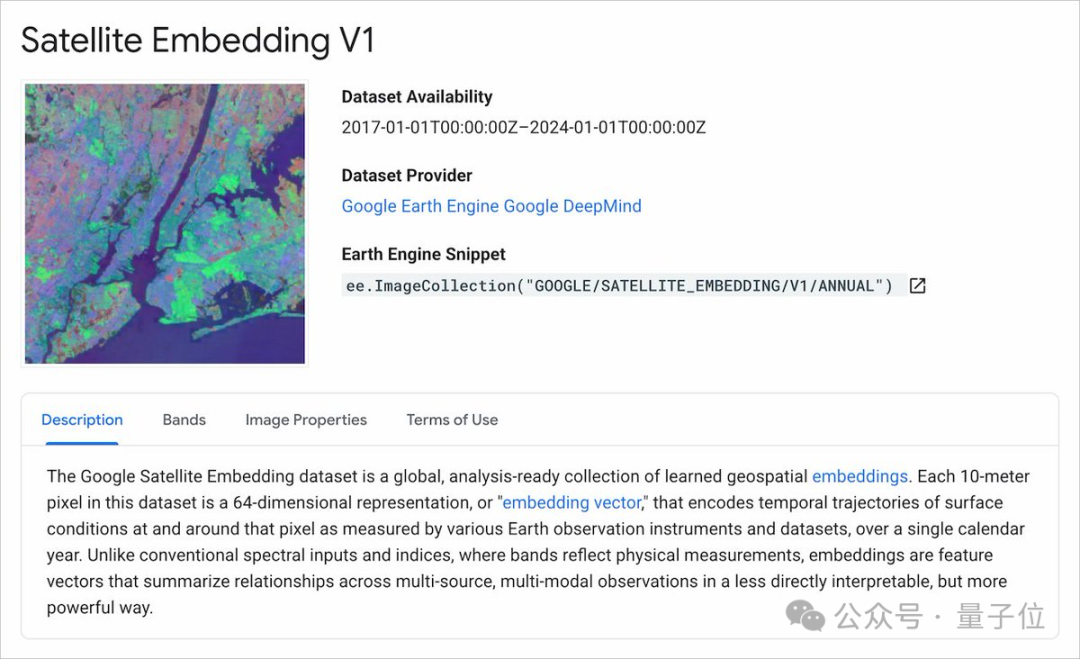
卫星嵌入数据集
在谷歌地球引擎中,由AEF驱动的卫星嵌入数据集是同类规模中最大的数据集之一,每年包含超过1.4万亿个潜入足迹。目前已在Earth Engine数据目录发布。
这一系列年度嵌入数据已被全球多个组织采用,其中包括联合国粮食及农业组织、哈佛森林、地球观测组织等。它们借助该数据集制作功能强大的自定义地图。
例如,“全球生态系统地图集”这一项目旨在打造首个全面资源,用于绘制和监测全球生态系统。该项目正利用此数据集帮助各国将未测绘的生态系统划分为海岸灌丛、极端干旱沙漠等类别。
全球生态系统地图集全球科学负责人Nick Murray说:
卫星嵌入数据集正在彻底改变我们的工作,它帮助各国绘制未知生态系统的地图——这对于精准定位保护工作的重点区域至关重要。
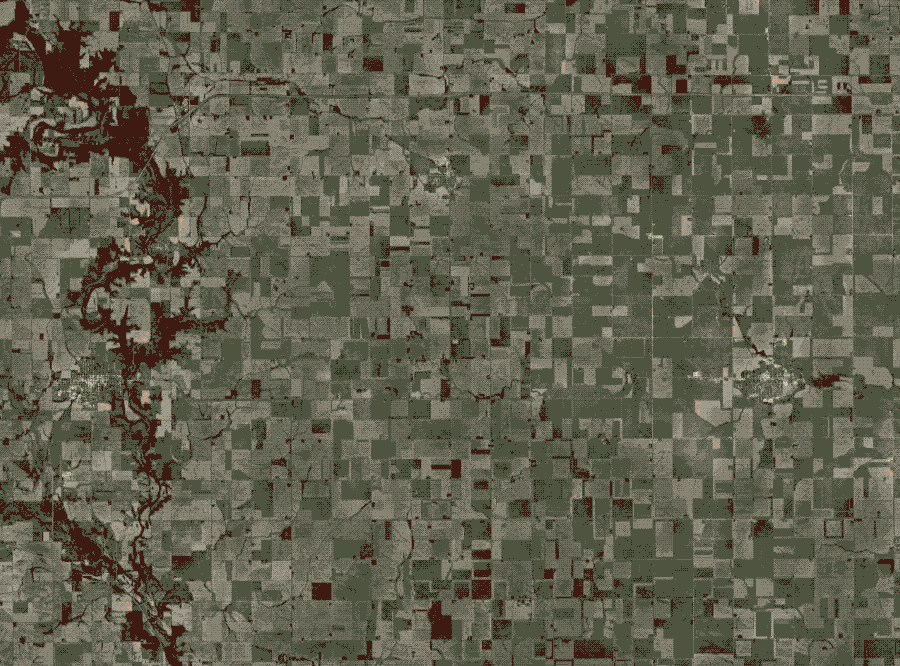 展示卫星嵌入数据集从粗到精的分割的无监督聚类动画
展示卫星嵌入数据集从粗到精的分割的无监督聚类动画
巴西MapBiomas团队正在测试该数据集,以更深入地了解全国范围内的农业和环境变化,它为亚马逊雨林等关键生态系统的保护策略和可持续发展举措提供了重要依据。
AEF还有助于解决粮食安全、森林砍伐和水资源等关键问题。
对此,有网友表示:人工智能模型正在成为公共基础设施。
毕竟,看懂地球才能更好保护它。
论文地址:https://storage.googleapis.com/deepmind-media/DeepMind.com/Blog/alphaearth-foundations-helps-map-our-planet-in-unprecedented-detail/alphaearth-foundations.pdf
参考链接: [1]https://deepmind.google/discover/blog/alphaearth-foundations-helps-map-our-planet-in-unprecedented-detail/ [2]https://x.com/GoogleDeepMind/status/1950563700286398965 [3]https://x.com/demishassabis/status/1950667643771326784 [4]https://x.com/bilawalsidhu/status/1950580970907648234
— 完 —


