面对日益复杂的城市系统和多元化的社会需求,传统城市规划方法正遭遇瓶颈。
如今,人工智能(AI)正为这个古老而重要的领域带来颠覆性的革新。
近日,由清华大学电子工程系城市科学与计算研究中心、建筑学院与麻省理工学院(MIT)感知城市实验室、美国东北大学等顶尖机构的学者组成的跨学科团队,在国际前沿期刊《自然·计算科学》上发表观点文章,首次系统性地提出了一个由大语言模型(LLM)驱动的智能城市规划框架。

论文链接:https://www.nature.com/articles/s43588-025-00846-1
该框架将AI的强大计算、推理与生成能力,同人类规划师的专业经验与创造力深度融合,旨在将AI打造为人类的「智能规划助手」,共同应对现代城市规划中的复杂挑战,为实现更高效、创新和响应迅速的城市设计流程,开启了人机协同的新范式。
该论文第一作者为清华大学电子工程系博士生郑瑜,通信作者为清华大学电子工程系李勇教授、清华大学建筑学院林雨铭助理教授以及美国东北大学环境工程系Qi R. Wang副教授。
合作者包括清华大学电子系的徐丰力助理教授,以及MIT感知城市实验室的Paolo Santi研究员和Carlo Ratti教授。
城市规划的演进与瓶颈
城市规划的理论与实践在不断发展,从早期侧重物理空间和美学形态的「艺术设计」,演变为二战后将其视为复杂系统,并采用科学模型分析的「科学规划」。
然而,这些方法在今天面临着新的挑战:
一方面,规划过程仍以规划师为中心,公众参与的广度和深度有限;
另一方面,规划方案的评估往往是定性、主观且滞后的,难以进行科学的量化决策和快速迭代。
近年来,以生成对抗网络(GANs)和强化学习(RL)为代表的传统AI模型开始应用于城市规划,在生成街道网络、功能分区等方面展现了潜力。
但这些模型通常是为特定任务设计的,知识面狭窄,难以应对现代城市规划与日俱增的跨学科复杂性。
大语言模型(LLM)的出现,以其强大的知识整合、逻辑推理和多模态生成能力,为突破这一瓶颈带来了历史性机遇。
LLM驱动的城市规划新流程
针对传统方法的不足,研究团队创新性地提出了一个包含概念设计(Conceptualization)、方案生成(Generation)和效果评估(Evaluation)三个核心阶段的闭环框架。
该框架由大语言模型、视觉大模型(VLM)和大模型智能体(LLM Agent)协同驱动,为人类规划师提供全流程的智能辅助。
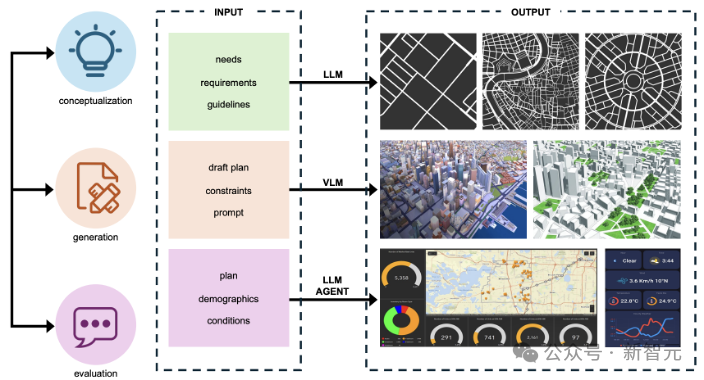
图1:提出的大语言模型驱动的城市规划框架。该框架整合LLM、VLM和LLM智能体,形成「概念-生成-评估」的协同工作流
概念设计:LLM成为拥有跨学科知识的「规划顾问」
在规划初期,规划师输入需求、约束和指导方针等文本信息。
经过海量数据预训练的LLM,能够深度整合地理、社会、经济等多领域知识,与规划师进行多轮「对话」。
它不仅能提出创新性的概念想法,还能根据复杂的上下文进行推理,生成详细的规划描述文本和初步的空间构想草图,极大地提升了概念设计阶段的效率和深度。
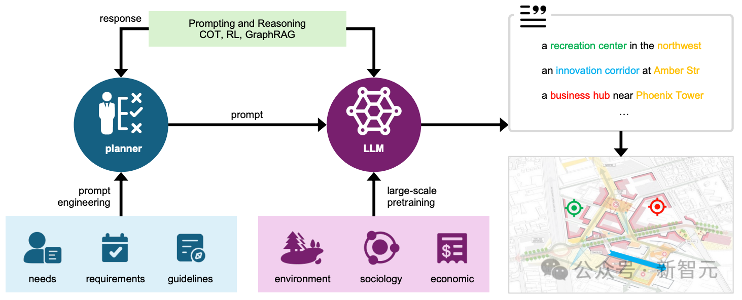
图2: 基于LLM的城市概念设计流程图
方案生成:VLM化身「视觉设计师」,将文字转化为蓝图
该框架利用视觉大模型(VLM)将抽象的文本概念转化为具体的、可视化的城市设计方案。
规划师可以通过文本指令(Prompt)精确描述规划概念和约束条件,经过城市设计数据微调的VLM能够生成精细的视觉输出,如土地利用布局、建筑轮廓,甚至是逼真的三维城市场景,同时还能确保设计符合地理等现实约束。
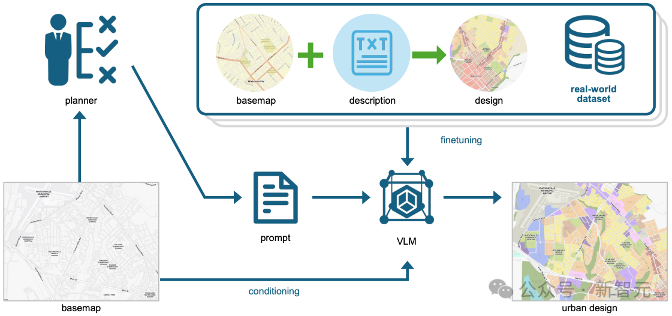
图3:城市方案生成示意图
效果评估:LLM智能体构建「虚拟城市」,预演未来生活
为了对规划方案进行科学评估,框架引入了LLM智能体进行城市动态模拟。
研究人员为智能体设定不同的人口统计学特征(如年龄、职业),让它们在生成的虚拟城市中模拟居民的日常出行、设施使用等活动。
通过分析这些模拟行为,可以得到关于交通距离、设施使用率、碳排放、社会公平性等多维度的量化评估指标,为规划方案的迭代优化提供科学、前瞻性的反馈。
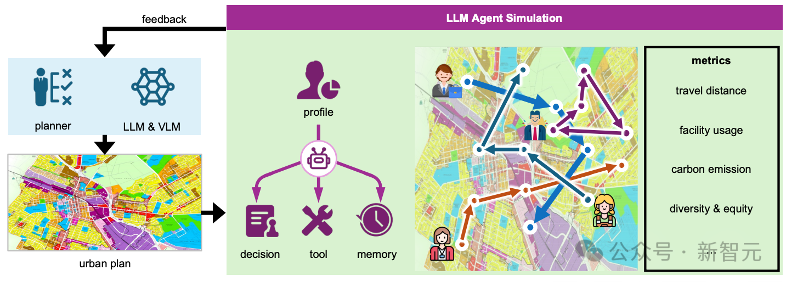
图4:基于LLM&VLM智能体的城市规划效果评估方案
初见成效
AI展现超越人类专家的潜力
为验证该框架核心能力的可行性,清华大学电子系城市科学与计算研究中心持续发布CityGPT、CityBench、 UrbanLLaVA等系列语言视觉跨模态城市大模型及UrbanWord、EmbodiedCity、AgentSociety等城市具身仿真平台与社会模拟系统,为大模型时代的城市规划与社会治理奠定了技术基础。
针对LLM时代的城市规划,研究团队进行了一系列概念验证实验。
在一项测试中,研究者让LLM回答城市规划师专业资格考试的题目,结果显示,最大规模的LLM在回答复杂规划概念问题上的表现,超过了排名前10%的人类规划师,证明了其在概念化阶段的巨大潜力。
在评估阶段的模拟测试中,团队利用LLM智能体在美国纽约和芝加哥的两个社区中模拟居民的设施访问行为。
模拟结果显示,智能体访问的热点区域与真实的居民流动数据高度吻合,证明了LLM智能体在预测规划方案实际影响方面的准确性和有效性。

图5:LLM生成城市规划效果示意图
挑战与展望
构建人机协同的未来城市
研究团队最后强调,这一框架并非要取代人类规划师,而是旨在建立一种人机协同的新工作流。
在这种模式下,规划师可以从繁琐的数据处理和绘图工作中解放出来,更专注于创新、伦理考量以及与各方利益相关者的沟通,而AI则负责高效地完成概念整合、方案生成和模拟评估。
同时,文章也指出了该技术路线面临的挑战,包括高质量城市设计数据的稀缺性、巨大的计算资源需求,以及模型中潜在的地理和社会偏见等。
未来的研究需要建立开放的数据平台,开发更高效的专用模型,并设计公平性算法,确保AI技术能够公平、包容地服务于所有城市环境。
我们可以期待在不久的将来,城市规划师借助强大的AI助手,能够更快、更好地设计出高效宜居、可持续的城市,充分释放人类的创造力来塑造我们共同的城市家园。


