400元遥操95%机械臂,上海交大推出开源项目U-Arm!
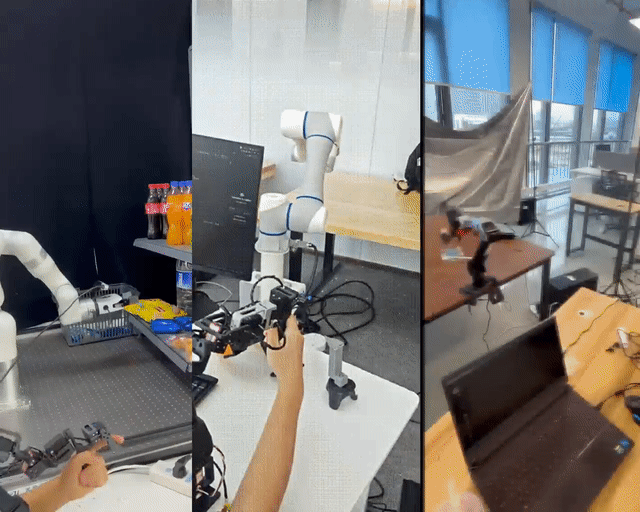
目前它已在XArm6、Dobot CR5、ARX R5等多种机械臂真机上进行了遥操作的验证。
如何用更低的成本、更高的效率,去采集、复现和扩展人类的操作数据?
遥操作是当前阶段的主流数据采集方案。
然而,完全同构的遥操作系统往往花费昂贵,例如ALOHA项目用两主两从完全同的机械臂进行遥操作,整套系统花费超过2万美金,而相对低成本的VR、手柄、GELLO框架又存在奇异点、适配难等问题。
近日,来自上海交通大学的团队推出了一项开源解决方案——LeRobot-Anything-U-Arm。
这是一套仅需400元即可搭建、适配95%主流机械臂的通用遥操作系统。
传统的主从遥操作系统通常要求主从臂严格同构,或以一个固定比例放缩几何尺度,这在直觉上确保人类操作者能够如预期地遥控从臂,但这在实践中并非必要。
团队指出,人类的视觉反馈可以自然地补偿硬件几何差异,只需保证关节的排布顺序一致,就能获得良好的操作体验。
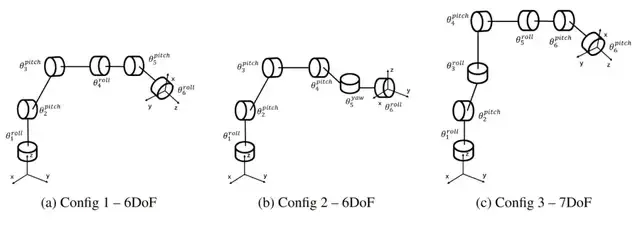
而由于逆运动学解析解的存在性(Pieper准则约束)与仿人构型的设计,当前市面上主流的6轴、7轴机械臂的关节顺序只有3种。
于是,U-Arm便针对这三种拓扑结构分别设计了三款机械构型,用户只需根据自己机械臂的类型选择对应config的硬件,即可实现即插即用。
如文章开头的图片展示,U-Arm已在XArm6、Dobot CR5、ARX R5三种机械臂真机上进行了遥操作的验证。
在软件兼容性方面,U-Arm推荐用基于ROS的控制方案实现遥操作框架中指令发送与接收的解耦,他们将控制器封装成了ROS节点,对于不同的从臂,只需订阅U-Arm发布的关节角度话题并发送到对应的机械臂接口即可。

此前已经有了一些低成本的3D打印遥操臂工作,舵机成本是这些硬件设备的大头。以GELLO为例,不计算3D打印耗材成本的情况下,其单臂总BOM成本为288.24美元,其中所采用的Dynamixel舵机与控制板所占成本就超过了250美元。
U-Arm重新设计了硬件方案,在压低成本的同时提升了可维护性和寿命。
其选用的舵机单价仅45元人民币,一整套系统(不含3D打印材料)成本不到400元。
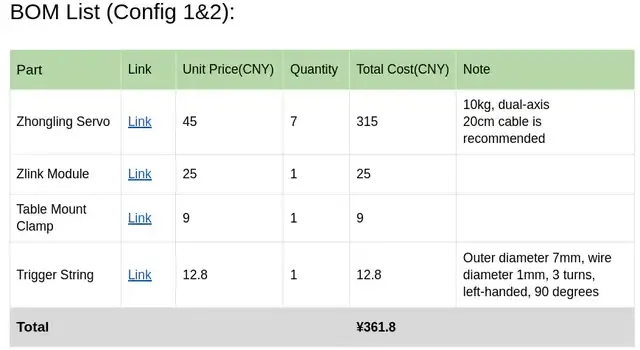
此外,团队还在此基础上优化了结构设计与装配方式,来解决实际遥操过程中可能会遇到的易用性问题。
例如,他们将舵机的齿轮箱拆除,仅保留编码器,同时在所有关节处均采用双轴固定设计,使得各关节运动时的阻力仅来自于可调节的舵盘螺丝,在确保操作顺滑的同时避免无主动扭矩的遥操臂在接近工作空间极限时,某些关节由于重力作用下坠的情况。

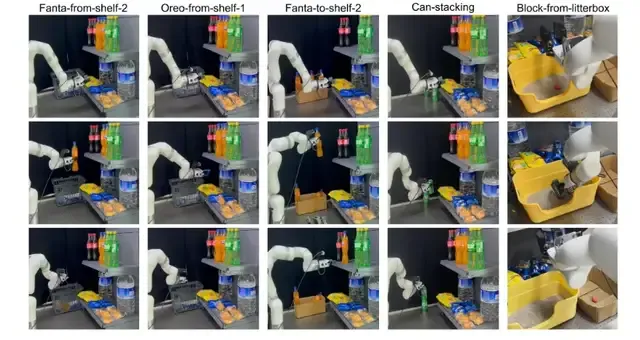
团队在5种夹爪操作任务(从2层货架上夹取芬达放入纸箱、从1层货架夹取饼干、从纸箱中分拣商品放回货架、堆叠易拉罐、在猫砂盆中夹取草莓)对U-Arm的遥操作性能进行了实验。
在baseline的选择上,他们并没有选用VR遥操进行对比,而是选择了成本在相近水平的游戏手柄。
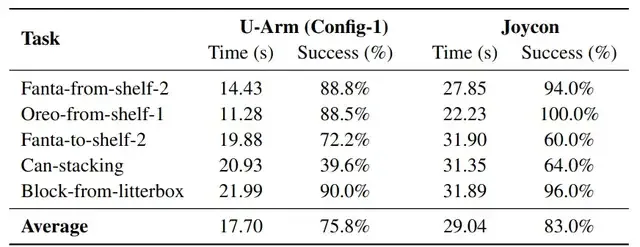
实验表明,U-Arm在5种任务上的平均操作时间比使用游戏手柄进行操控缩短了39%,这主要得益于主从臂遥操的架构在优化了冗余自由度的操控性能后,在任务的大范围扫掠阶段能够以更快且自然的动作接近目标。
然而,在例如堆叠易拉罐的精细任务操作上,U-Arm的执行成功率会下降,这主要是由于操作者在接近物体后,非预期的小范围移动会直接导致这些任务的失败,而使用手柄时则允许操作者“看清楚了再行动”。
但相较于数采效率的大幅提升,这部分失败是完全可以接受的trade-off。
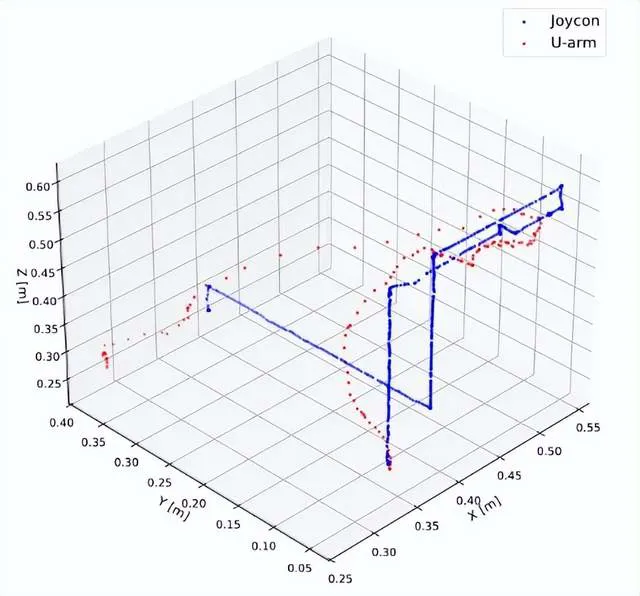
在数据质量上,U-Arm相较手柄也能够获得更自然的运动轨迹,如下图所示。团队指出,在与其他来源的数据进行共同训练时,分布上的相似性也更有利于模型的收敛。
目前,该项目已经在GitHub上开源了全部的硬件STL与STEP文件、软件例程与装配指引,提供了SAPIEN仿真环境的测试例程。团队同步在huggingface上开源了用U-Arm采集的XArm6数据,并持续更新中。
项目GitHub链接:github.com/MINT-SJTU/LeRobot-Anything-U-Arm相关技术报告:arxiv.org/abs/2509.02437部分使用U-Arm采集的XArm数据:https://huggingface.co/MINT-SJTU