作者:张昊,伊利诺伊大学香槟分校博士生,研究方向为 3D/4D 重建、生成建模与物理驱动动画。目前在 Snap 担任研究实习生,曾于 Stability AI 和上海人工智能实验室实习。PhysRig 由 UIUC 与 Stability AI 联合完成,旨在推动角色动画迈向更真实、可控的物理解法。
个人主页:https://haoz19.github.io/

动画角色在动起来时,是否常常显得 「塑料感十足」?即使使用再复杂的骨骼系统,人物走路时还是像带着铰链的木偶?这是因为当前主流的绑定(rigging)技术 —— 线性混合蒙皮(Linear Blend Skinning,简称 LBS)虽然效率高、计算方便,但在遇到柔软材质(如皮肤、脂肪、动物尾巴)时,往往会出现体积丢失、扭曲甚至 「糖果包裹」 效应,严重影响真实感。
在 ICCV 2025 最新接收论文《PhysRig: Differentiable Physics-Based Skinning and Rigging Framework》中,来自 UIUC 和 Stability AI 的研究者提出了一个新框架:将 「刚性骨架 + 弹性软体」 的建模方式引入绑定流程,利用可微分物理模拟方法,实现更真实、更自然的动画角色变形效果。

项目链接:https://physrig.github.io
论文链接:https://arxiv.org/abs/2506.20936
代码链接:https://github.com/haoz19/PhysRig
01 | 传统 LBS 的困境
LBS 通过将每个点的位置作为骨骼变换的加权平均来生成动画。这种方法在过去几十年中被广泛使用于游戏、影视、甚至研究中。但它的本质是线性的、非物理的。
其主要问题包括:
体积丢失:比如手臂弯曲时出现 「瘪掉」的现象;
旋转伪影:如关节处的 「糖果扭转」;
无法模拟柔软材质:如胖胖角色的肚皮、动物的尾巴、耳朵。
尽管也有研究尝试使用深度学习优化 LBS 的权重或参数,但其结构性的缺陷始终难以弥补。
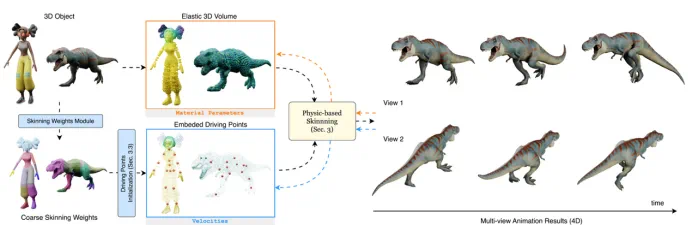
02 | PhysRig 的核心思想
PhysRig 开辟了一条新路:把骨骼嵌入到一个可变形的柔体体积中,让骨骼带动的不再是直接控制的点,而是通过模拟物理过程,产生形变结果。
整个框架有三个关键组件:
可微物理模拟器
基于 Material Point Method(MPM)实现;
使用连续介质力学理论,考虑应力应变、质量守恒、动量守恒等;
模拟真实物体在受力下的自然变形过程。
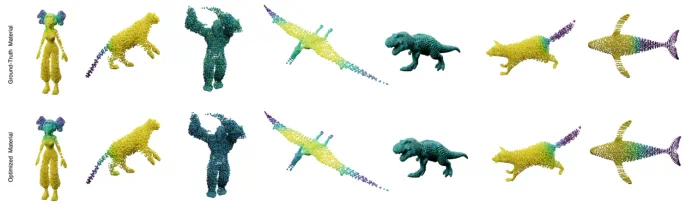
材料原型(Material Prototypes)
用少量的原型(如 25~100 个)代表不同区域的弹性材质;
每个原型有弹性模量(Young’s modulus)和泊松比(Poisson’s ratio);
使用马氏距离在空间中进行插值分配,控制不同区域的材质响应。
驱动点系统(Driving Points)
类似于骨骼的 「虚拟关节」;
控制其速度即可间接控制变形;
初始化自传统 rigging 工具如 Pinocchio,并通过优化进行细化。
03 | 物理模拟与优化策略
为了实现从 「观察到的动画结果」 反推出 「内部骨骼运动和材质参数」
,PhysRig 提出了迭代式的反向绑定(Inverse Skinning)优化流程:
1. 固定骨骼速度,优化材料参数;
2. 固定材料参数,逐帧优化驱动点速度;
3. 两者交替迭代,直到收敛。
这种策略考虑了材料属性的 「时序一致性」与骨骼动作的 「逐帧局部性」,使得优化更稳定、高效。
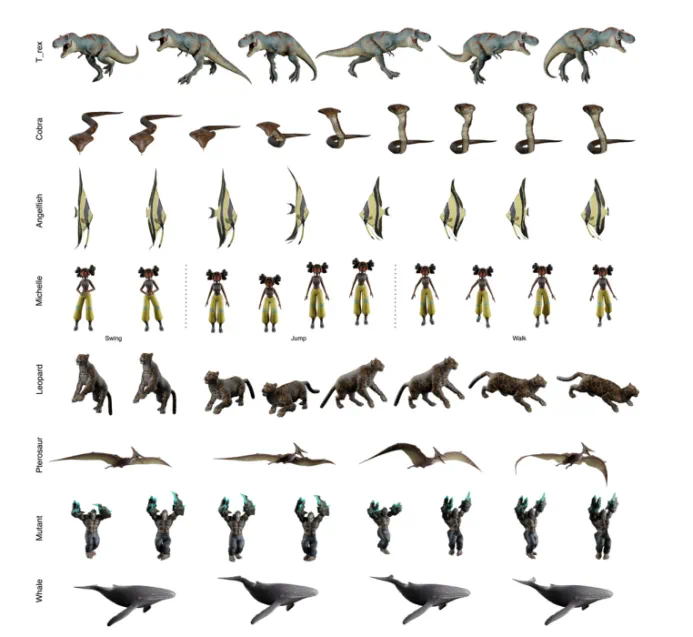
04 | 全面评测与数据集
为了全面验证 PhysRig 的有效性,研究者构建了一个包含 17 种角色(共 120 组动画序列) 的数据集,涵盖:
人形角色(如 Michelle、Kaya)
四足动物(如豹子、猛犸、剑龙)
非常规生物(如鲨鱼、翼龙、眼镜蛇)
对比对象包括:
LBS + RigNet 初始化
LBS + Pinocchio 初始化
LBS + GT 初始化
以及 PhysRig 的初始和优化结果
采用指标包括用户评分(User Rating)和 Chamfer 距离(CD),PhysRig 在几乎所有类别上都显著优于传统方法,表现出更真实的动态效果。
05 | 拓展应用:动作迁移
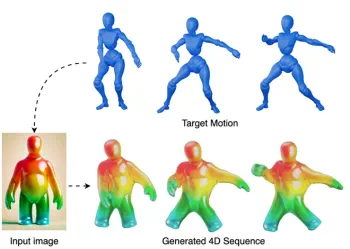
PhysRig 不仅能从已有动画反推参数,还可以实现 基于骨架角度的动作迁移(Pose Transfer)。
具体做法是:
1. 提取源动画的骨骼角度序列;
2. 将其传递给目标对象(如不同物种);
3. 使用 PhysRig 生成自然形变的体积动画。
相比传统需要预测蒙皮权重的方法,PhysRig 不依赖显式权重预测,更适合处理结构差异大的对象(比如人到果冻怪的动作迁移)。

06 | 总结与展望
PhysRig 提供了一种从传统 rigging 迈向物理真实绑定的路径:
摆脱 LBS 线性模型的限制;
实现结构丰富、材质多样对象的自然变形;
与深度学习兼容,可用于可微优化与端到端训练;
为动画、游戏、影视、机器人仿真等领域打开新的思路。
目前,项目已在官网上线展示,并计划在 ICCV 2025 会议前后开源代码与数据集。未来还计划将其封装为 Blender 插件,面向动画艺术家提供可用工具。
🎬 如果你也对物理模拟和角色动画感兴趣,欢迎访问项目主页或与作者联系交流!